기계 기본 메커니즘·요소

⚙️ 기계 메커니즘 한눈에 보기
| 구분 | 대표 요소 | 핵심 기능 | 예시 |
|---|---|---|---|
| 기본 운동 변환 | 캠, 웨지, 스크류, 레버, 기어, 벨트/체인 | 회전 ↔ 직선 변환, 힘·속도·토크 조절 | 밸브, 도끼, 바이스, 저울, 시계, 자전거 |
| 운동 제약 & 연결 | 힌지, 슬라이더, 래칫, 스프링, 댐퍼 | 자유도 제한, 복원/완충, 단방향 운동 | 경첩, 서랍, 자전거 뒷바퀴, 서스펜션 |
| 복합 메커니즘 | 링크, 크랭크-슬라이더, 기어트레인, 차동기어 | 단순 운동 → 복잡 운동, 속도·토크 변환 | 와이퍼, 피스톤, 변속기, 자동차 차동장치 |
| 고정 & 체결 | 키/스플라인, 베어링, 커플링, 클러치·브레이크 | 축 고정, 마찰 저감, 축-축 연결, 제동/분리 | 볼 베어링, 유연 커플링, 자동차 클러치 |
| 마찰·접촉 | 캠-팔로워, 클램프, 프릭션 드라이브 | 접촉·마찰로 운동/고정/전달 | 프린터 롤러, 고정 장치 |
| 심화 메커니즘 | 제네바, 에스케이프먼트, 하모닉 드라이브, 토글, 유성기어 | 간헐/정밀 운동, 초고감속, 큰 잠금력 | 시계, 로봇 관절, 프레스기, 감속기 |
1. 기본 기계 운동 변환
캠(Cam)
회전 운동 → 왕복 운동/특정 곡선 운동 변환
(예: 자동차 밸브 개폐)
웨지(Wedge)

직선 운동 + 힘 집중 → 분리/고정
(예: 도끼, 책 페이지 잠금장치)
스크류(Screw)
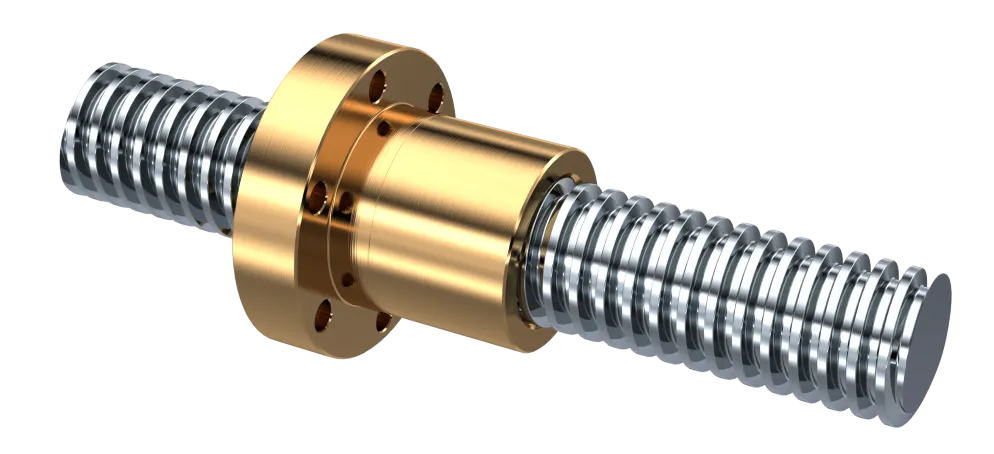
회전 운동 → 직선 운동 및 큰 힘 전달
(예: 바이스, 리드스크류)
기어(Gear)
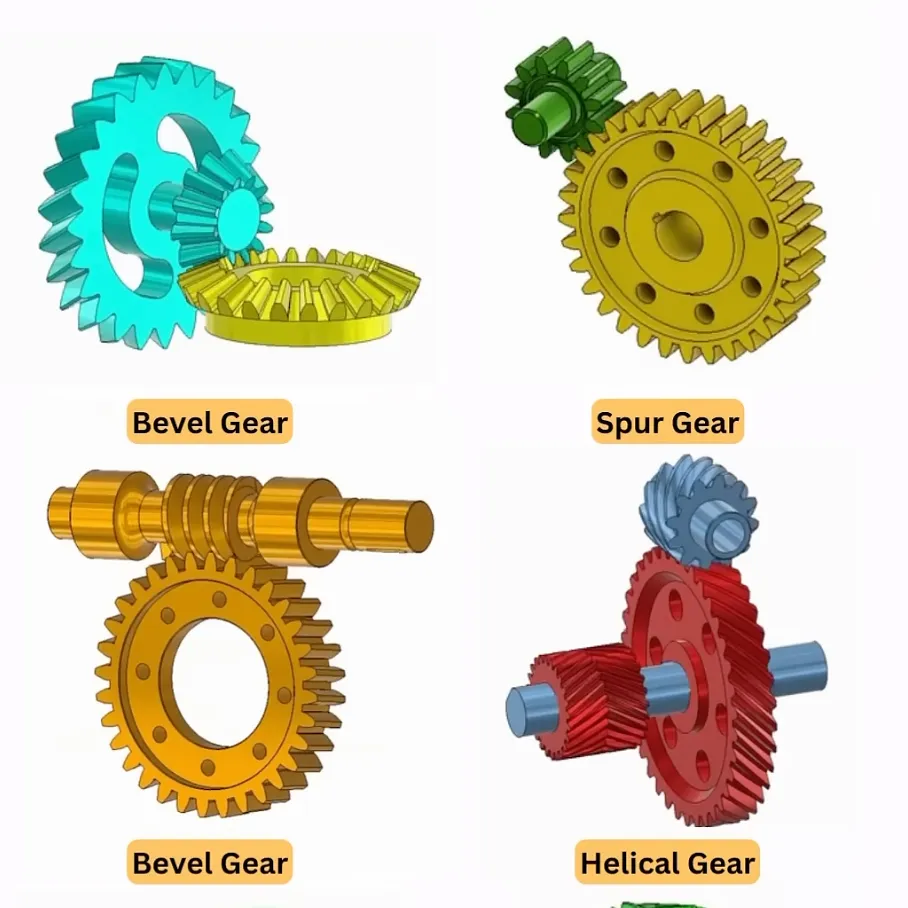
회전 운동의 속도·방향·토크 변환
(예: 감속기, 시계 기어트레인)
벨트/체인 구동(Belt & Chain Drive)
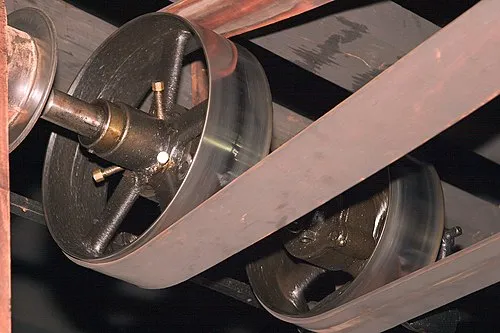
회전력 전달, 진동 흡수, 장거리 전력 전달
(예: 자전거 체인, 자동차 벨트)
레버(Lever)
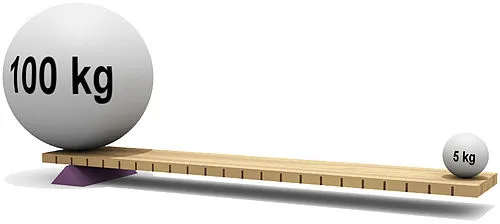
힘의 크기·방향 변환 (모멘트 원리)
(예: 집게, 저울)
2. 운동 제약 & 연결 요소
힌지(Hinge / Revolute Joint)

회전 자유도 1개만 허용
(예: 문 경첩, 로봇 암 관절)
슬라이더(Slider / Prismatic Joint)

직선 이동 자유도 1개만 허용
(예: 서랍 레일)
래칫(Ratchet & Pawl)
한 방향 운동만 허용 (역행 방지)
(예: 자전거 뒷바퀴, 소켓 렌치)
스프링(Spring)

복원력 제공, 에너지 저장/흡수
(예: 서스펜션, 클립)
댐퍼(Damper)
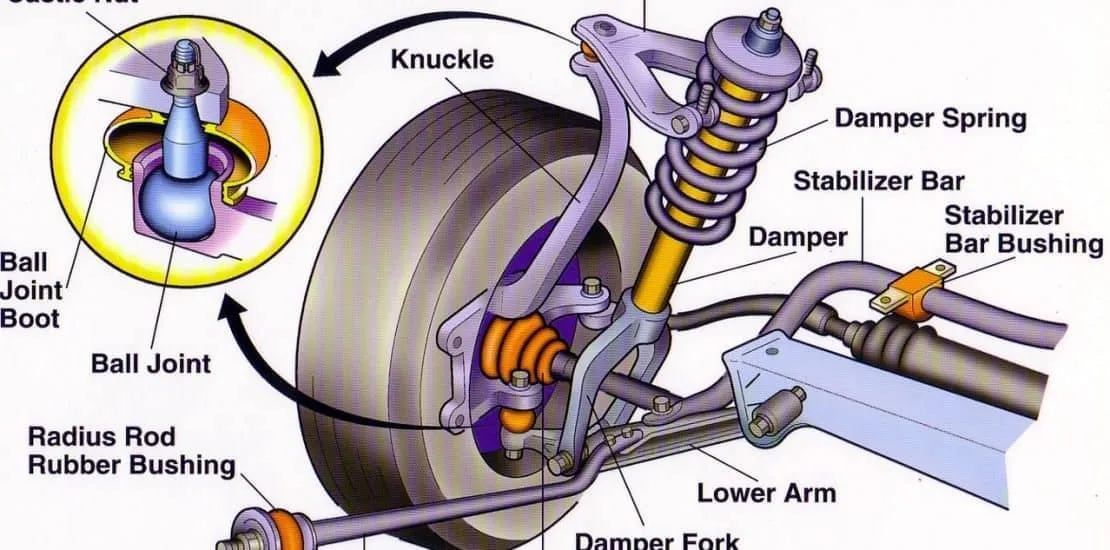
운동 에너지 소멸 (진동 억제)
(예: 자동차 쇼크업소버)
기타
- Helical(스크류) joint: 회전↔직선 연동 DOF=1, 피치 p로 연계.
- Cylindrical joint: 회전+직선 DOF=2 (동축).
- Spherical(볼) joint: 회전 3축 DOF=3.
- Planar joint: 평면 내 2평행이동+1회전 DOF=3.
3. 운동 조합 메커니즘
링크(Linkage, 4-bar 등)
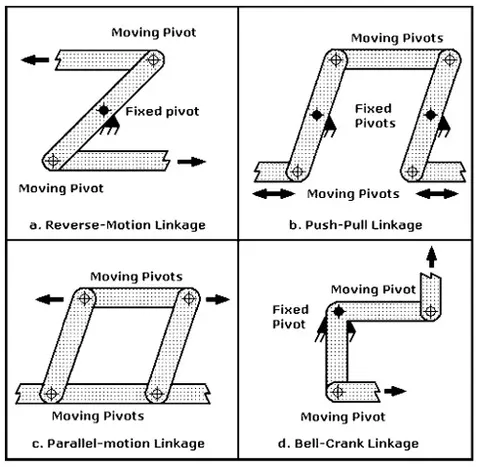
단순 회전/직선 운동을 복잡한 곡선 운동으로 변환
(예: 자동차 와이퍼, 증기 피스톤–바퀴 연결)
크랭크-슬라이더(Crank-Slider)
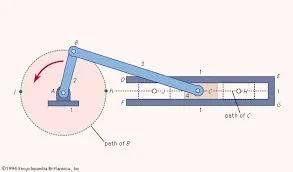
회전 ↔ 직선 변환
(예: 내연기관 피스톤, 펌프)
기어트레인(Gear Train)
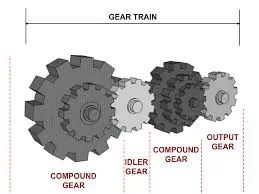
속도·토크 변환 및 다단 연결
(예: 자동차 변속기)
차동기어(Differential)
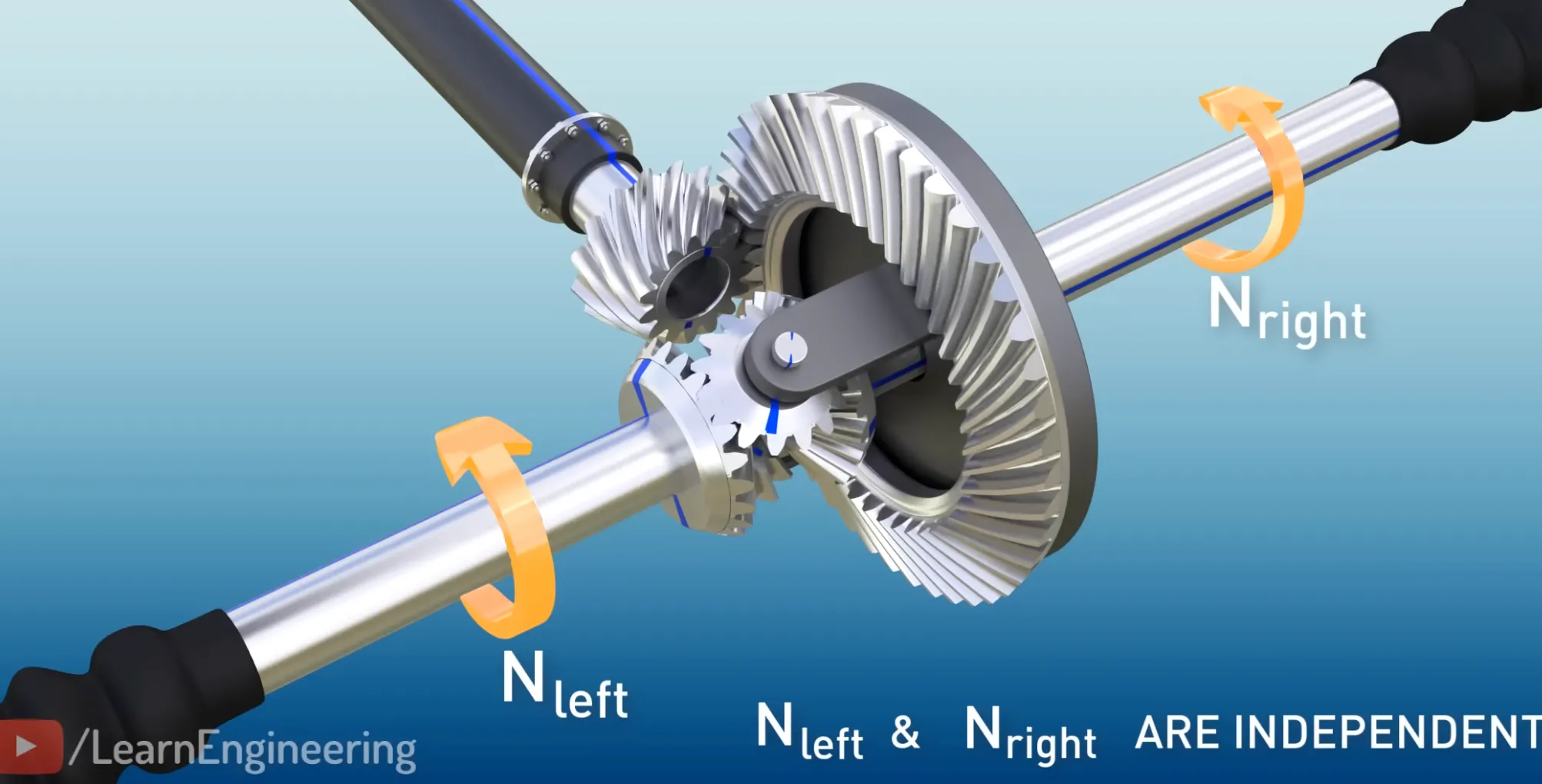
양쪽 축의 속도를 다르게 조절
(예: 자동차 바퀴 차동장치)
4. 고정 & 체결 요소
키(Key) / 스플라인(Spline)

회전축과 부품을 고정해 동력 전달
베어링(Bearing)

마찰 감소, 회전 운동 지지
(예: 볼 베어링, 롤러 베어링)
커플링(Coupling)

축-축 연결, 정렬 오차 흡수
클러치(Clutch) & 브레이크(Brake)
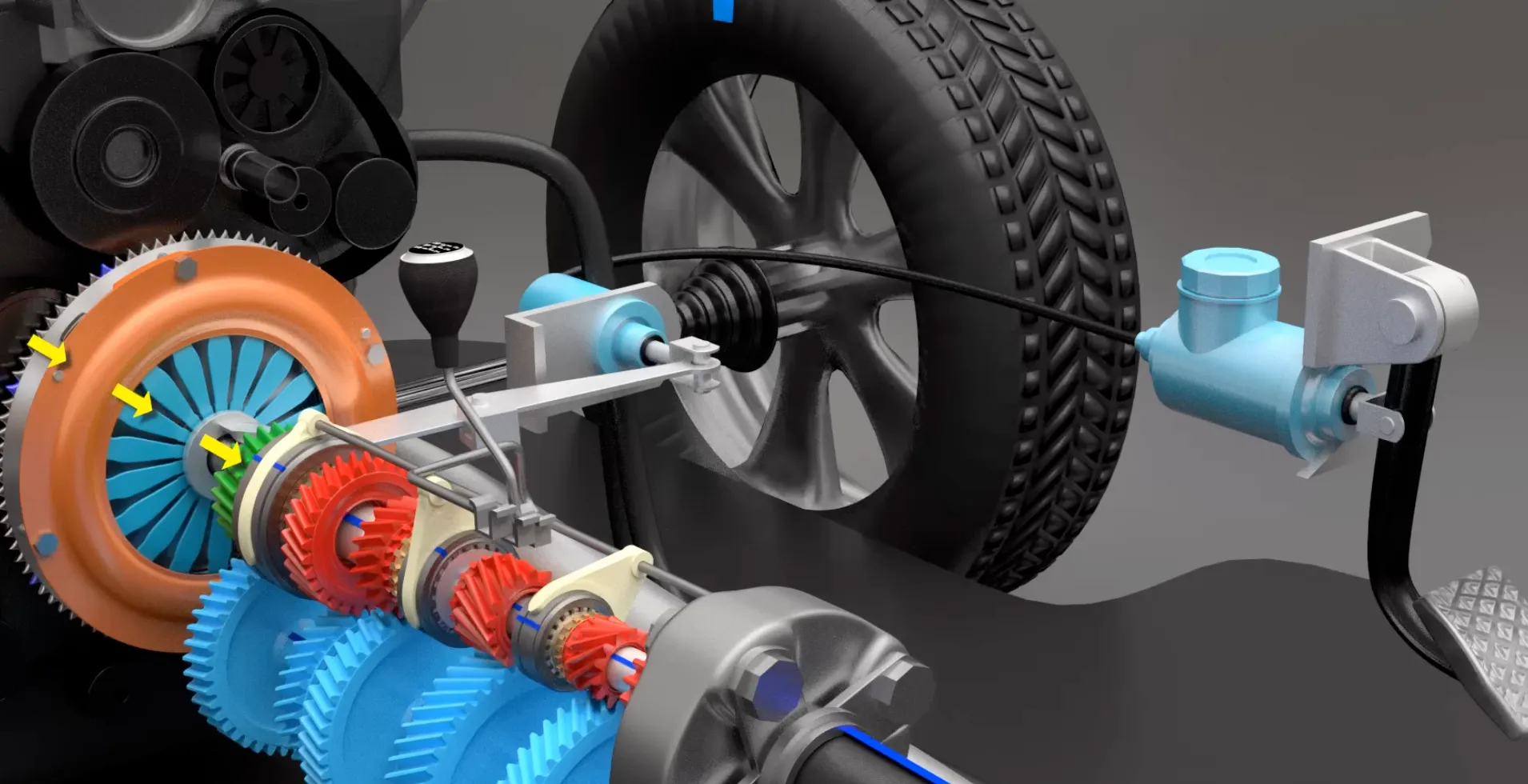
회전 운동 연결/차단, 제동
5. 마찰·접촉 메커니즘
캠-팔로워(Cam-Follower Contact)
국소 접촉으로 운동 프로파일 제어
클램프(Clamp)
마찰/압력으로 고정
프릭션 드라이브(Friction Drive)
마찰로 회전 전달
(예: 프린터 롤러, 페이지 피딩 장치)
6. 심화 메커니즘
제네바 메커니즘 (Geneva wheel)
연속 회전 → 간헐 회전 변환
영화 필름 운송, 시계, 라벨링 기계에 많이 쓰임.
장점: 간단히 정확한 indexing 가능.
단점: 고속에 불리, 충격·소음.
에스케이프먼트(Escapement)
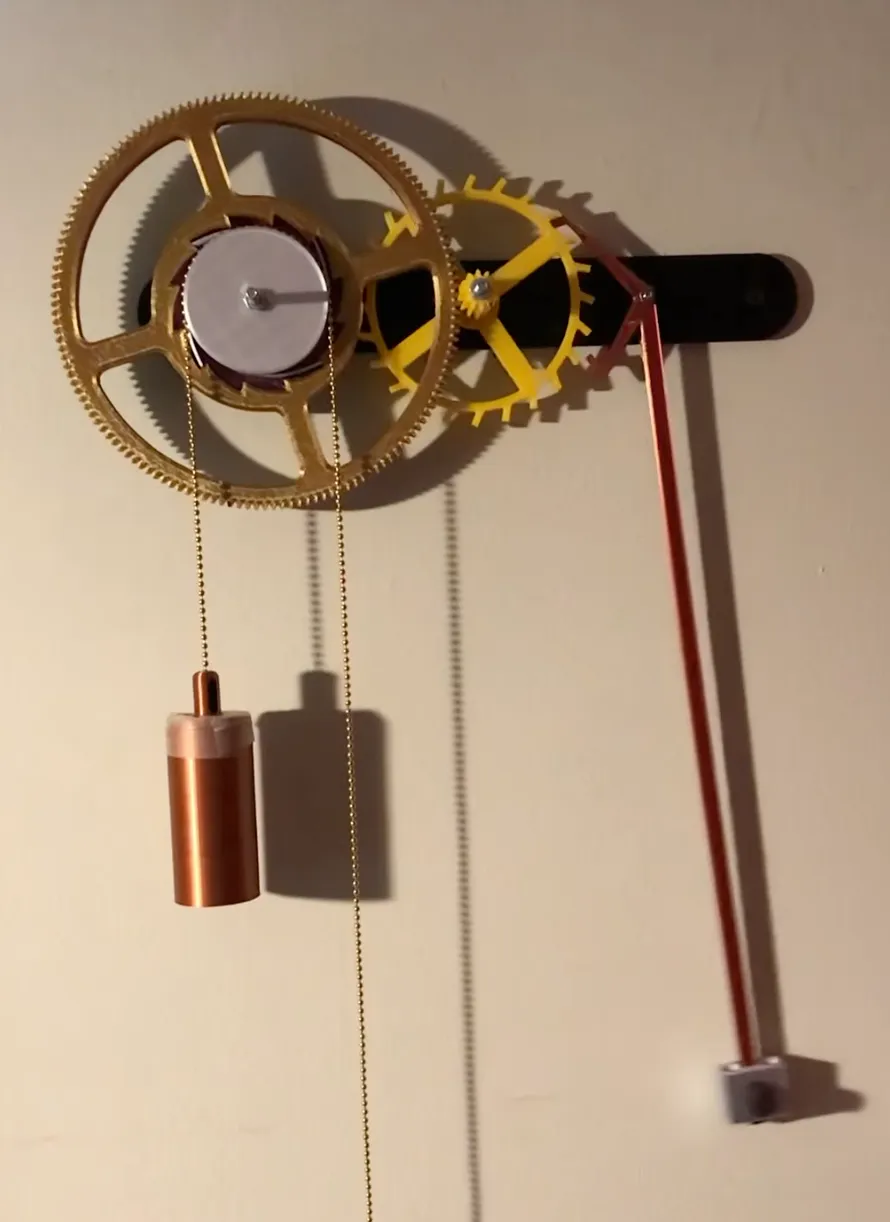
연속 에너지 공급을 “틱-틱”으로 분할
시계의 핵심, 진동 시스템과 맞물려 정밀 시간 유지.
하모닉 드라이브 (Harmonic drive)
유연한 파형 기어를 이용한 초고감속 장치
백래시 거의 없음, 정밀 로봇 관절에 필수.
단점: 제조 난이도 높음, 고가.
토글 메커니즘 (Toggle mechanism)

직선 운동 → 큰 잠금/압착력
프레스기, 집게, 스위치.
링크가 일직선이 되면 이론적으로 무한대 힘 전달(잠금).
에피사이클릭 기어 (Epicyclic gear)
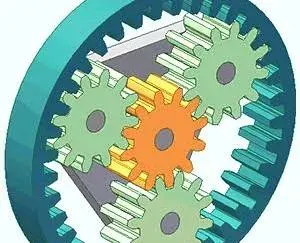
톱니가 중심 축 주위를 도는 특수 기어
차동 장치, 고속 감속기에서 사용.
정리
- 캠, 웨지, 스크류, 레버, 기어 → 운동/힘 변환의 5대 기본 원리
- 힌지, 슬라이더, 래칫, 스프링, 댐퍼 → 제약/복원/단방향 운동
- 링크, 크랭크-슬라이더, 기어트레인, 차동기어 → 복합 운동 메커니즘
- 키, 베어링, 커플링, 클러치, 브레이크 → 체결과 회전 지지
출처
구글에서 검색되어 나온 수많은 웹사이트들...