Kiro의 5개월

- Kiro Specifications
- Kiro 변천사
- Kiro 레슨런
3가지 챕터로 지난 Kiro의 5개월을 요약해보았다.
Chapter 1. Kiro Specifications
1. Key Performance
| Category | Specification |
|---|---|
| Required Interventions ⭐ | 5 |
| Page Damage Rate | 1% |
| Multi-page Lift Error Rate (Skipped Pages Error) ⭐ | 5% |
| Document Parsing Accuracy | 98% |
| Page Turning Speed | 288 pages/hour (~= 25 sec / dual pages) |
| Book → eBook Total Processing Time (300 pages) | ~75 minutes total |
| • Scan Time | ~60 minutes |
| • Text Correction Time | ~15 minutes |
| False Positive Flip Detection (Duplicate Pages Error) | 5% |
Kiro의 핵심 지표 7가지이다. 중요도 순으로 정렬했다.
- Required Interventions ⭐
- 책 한 권 스캔 중 사람의 개입 횟수이다. 자동 스캔 로봇으로서 0을 향해 계속 나아가고 있다. 현재 수치인 5는 너무 크다.
- 책의 페이지 수, 재질, 복원력 등에 따라 사람의 개입 횟수가 달라진다.
- 현재는 100페이지마다 실리콘 젤 패드를 물티슈로 닦아서 접착력을 복원시켜줘야 하며 책의 1/2에서 2/3 정도가 넘으면 역스캔 모드로 변경하고 책을 뒤집어줘야 한다.
- Page Damage Rate
- 책이 파손되지 않기 위해 비파괴 스캔을 Kiro로 하는데 Kiro가 책을 파괴해버리면 안되는 일이다. 많이 개선이 되었지만 여전히 100페이지 중 1페이지 정도는 살짝의 구겨짐이 생길 수 있다.
- Multi-page Lift Error Rate ⭐
- 2페이지 이상이 들릴 확률이다. 현재 2페이지 이상이 들렸음을 탐지할 수 없어 추후에 제대로 대처하기 위해서는 책 내용을 쭉 다 읽어보거나 스캔할 때 계속 지켜보고 있어야 한다. 자동 탐지 및 복구 시스템을 만들거나 0%로 만들어야 한다. 현재 20번 중 1번 정도의 확률로 발생한다.
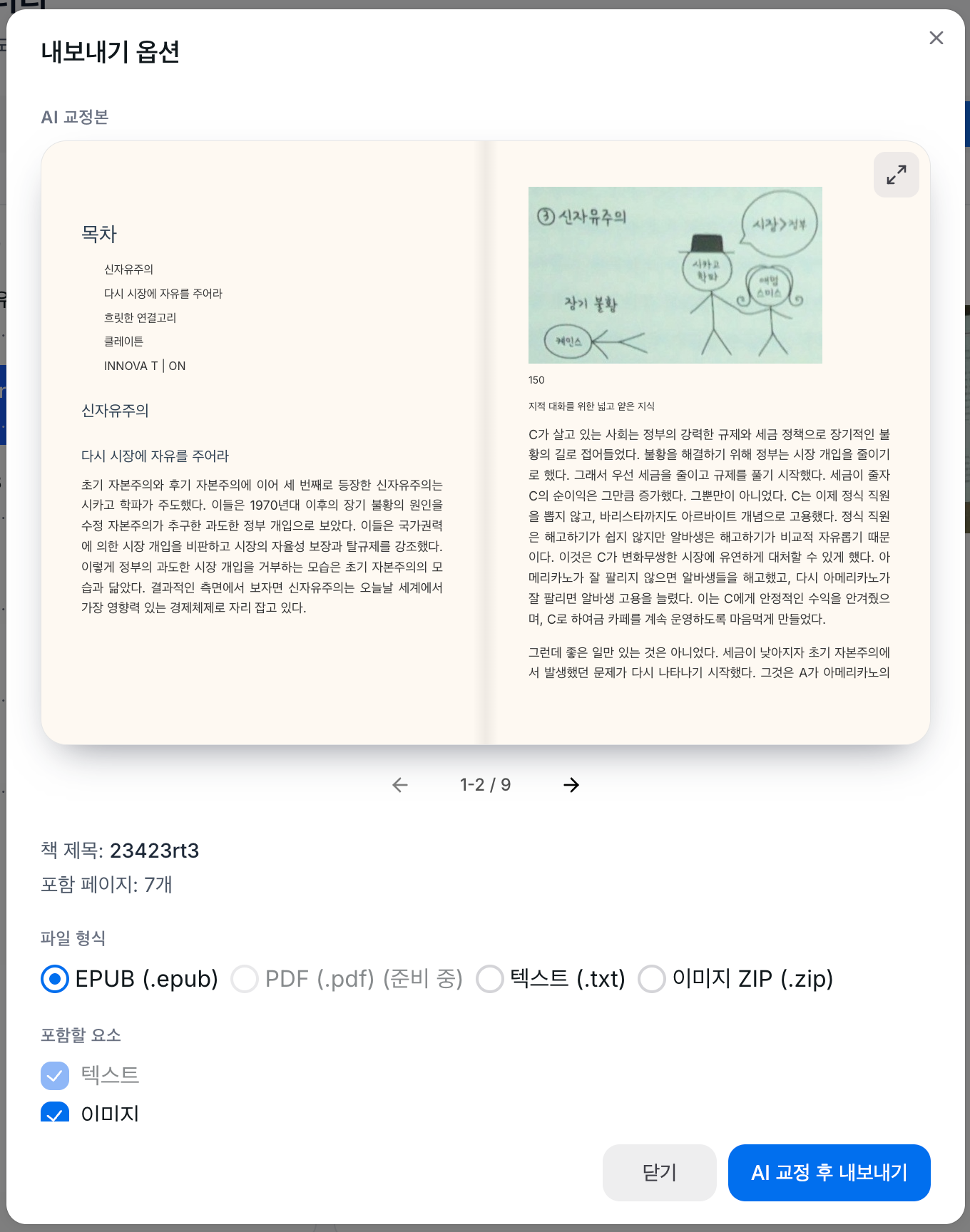
- Document Parsing Accuracy
- 카메라 업그레이드와 Document Parsing API를 통해 98% 정도까지 끌어올렸다. AI 교정까지 있어 현재 수준으로도 프로덕션에서 크게 문제되지는 않는다.
- Page Turning Speed
- 1시간 동안 150번을 넘겨 총 300페이지를 스캔할 수 있다. 한번 넘길 때 약 25초 정도 소요된다.
- Book → eBook Total Processing Time
- Kiro의 존재 이유인 Book → eBook 전체 소요 시간이다. 현재 이상적인 케이스일 때 약 75분 정도 걸린다. 1, 2, 3, 4가 모두 완벽하다고 한다면 75분도 나쁘지 않은 수준이다.
- False Positive Flip Detection
- Multi-page Lift Error Rate와 반대로 못 넘겼는데 넘겼다고 판단해서 중복 스캔하는 경우이다. 이것도 20번 중 1번 정도의 확률로 발생하지만 책 내용을 기반으로 즉시 중복 여부를 판단할 수 있어서 현재 크게 중요하진 않다.
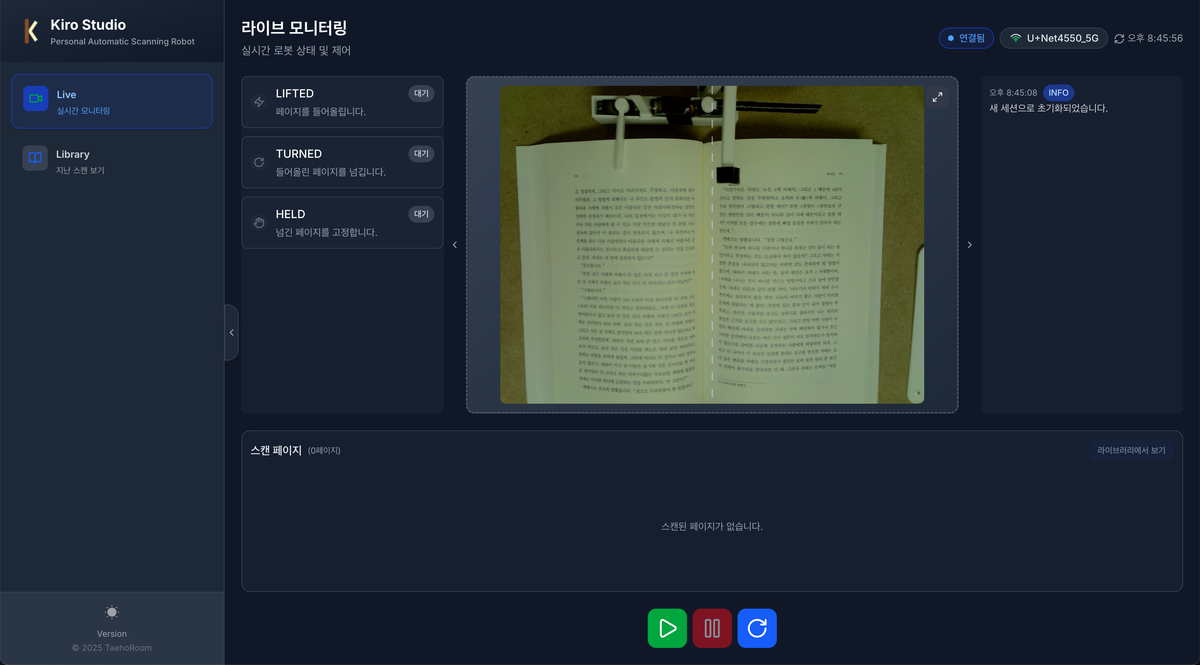
2. User Experience
| Category | Specification |
|---|---|
| Setup Time | Under 3 minutes |
| Status Indicator | LED |
| Control Interface | Web UI (desktop & mobile), HTTP / WebSocket |
| Export Formats | EPUB, TXT, ZIP (raw images) |
| Noise Level | 70-80 dB |
| Software Features | Control Board, Focusing, Reverse Scan Mode, Manual Scan Mode, Document Parsing (Image Extraction), AI correction, Epub Generation |
- Setup Time
- Kiro v1.4 매뉴얼 이 문서를 보고 셋업할 수 있다.
- 넥 조립, 파워 연결, Wifi 연결까지 3분 이내로 셋업 가능하다. 현재로 충분하다.
- Status Indicator
- 기기의 상태를 LED를 통해 쉽게 파악할 수 있다.
- Control Interface
- WebUI를 통해 Kiro를 쉽게 제어할 수 있다.
- Export Formats
- 추후에 PDF 등 다른 형태를 고객들이 요청하면 추가할 예정이다.
- Noise Level
- 현재 약 80데시벨로 동작 중일 때 소음이 다소 크다.
- Software Features
- 제어 보드, 초점 맞추기, 역스캔 모드, 수동 스캔 모드, 자동 document parsing, AI 교정, 전자책 생성 기능들을 갖추고 있다.
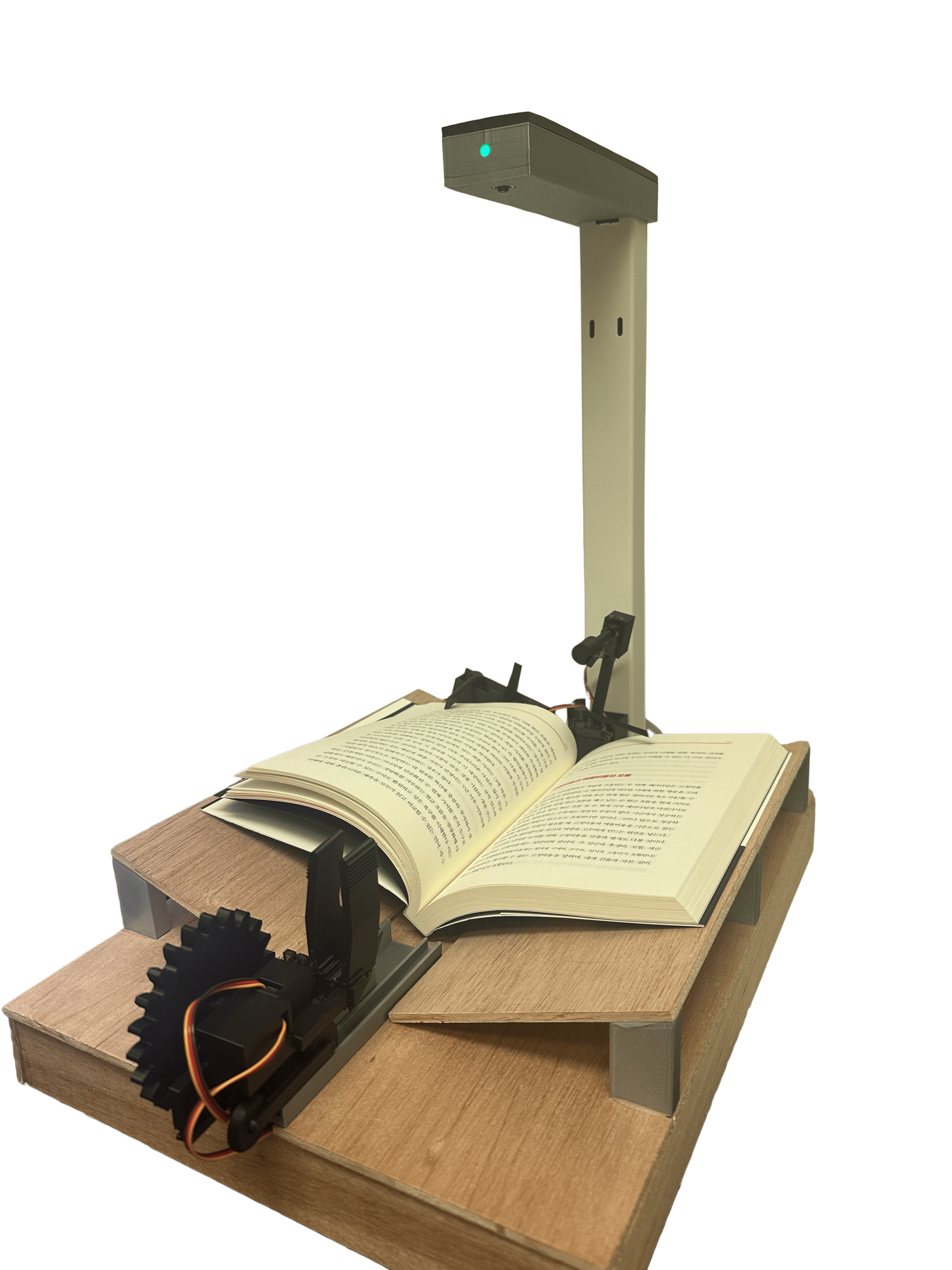
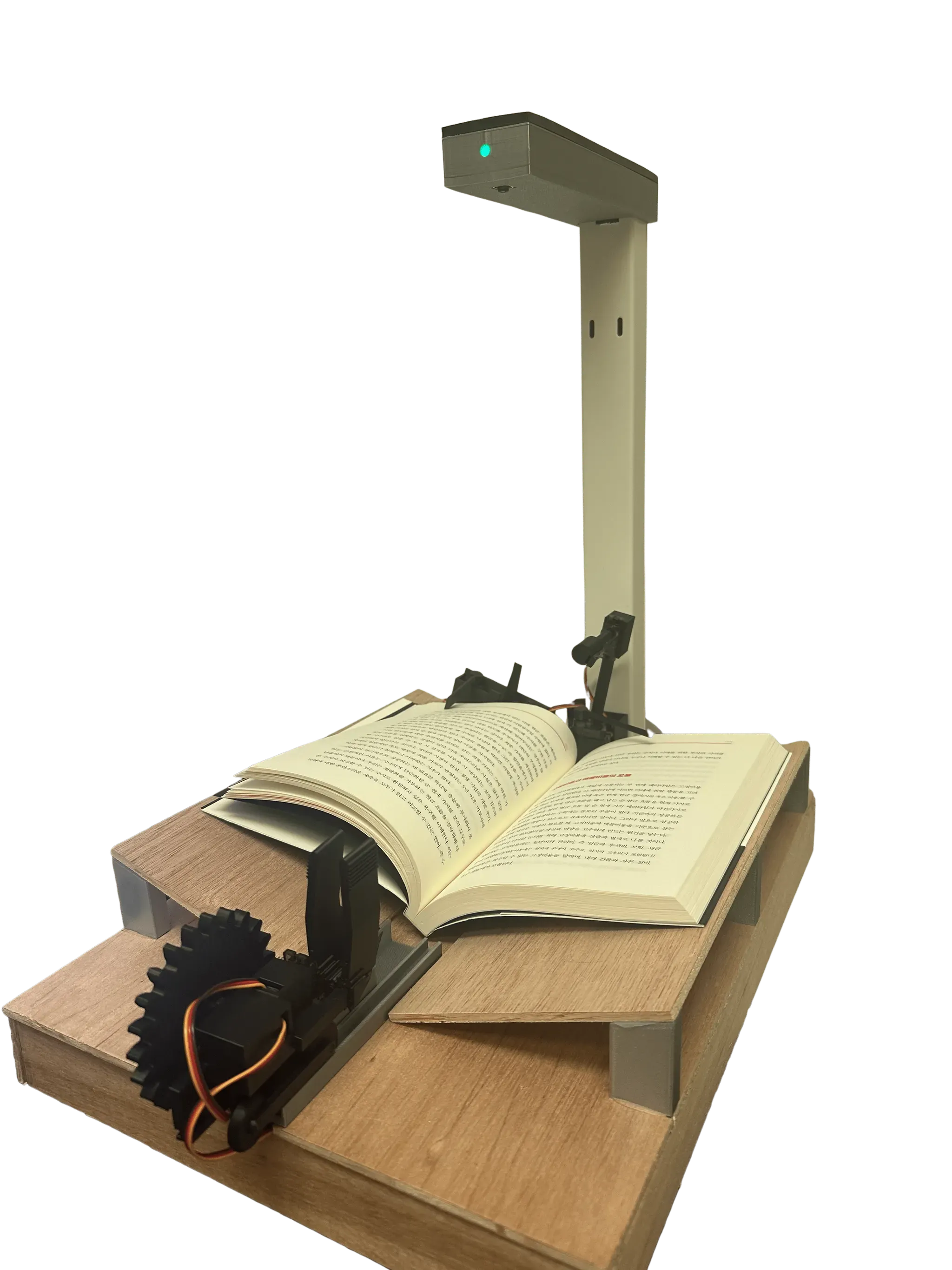
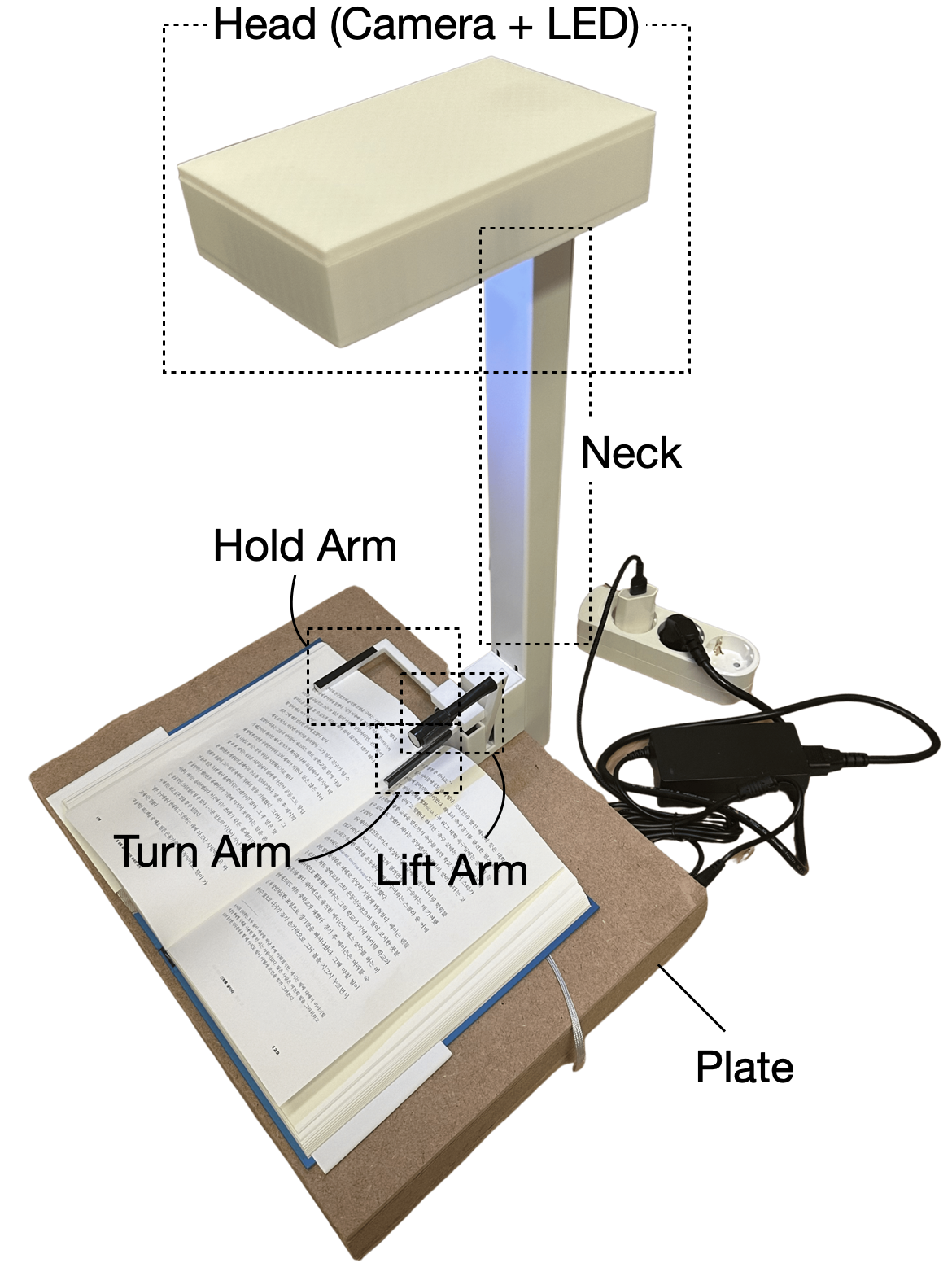
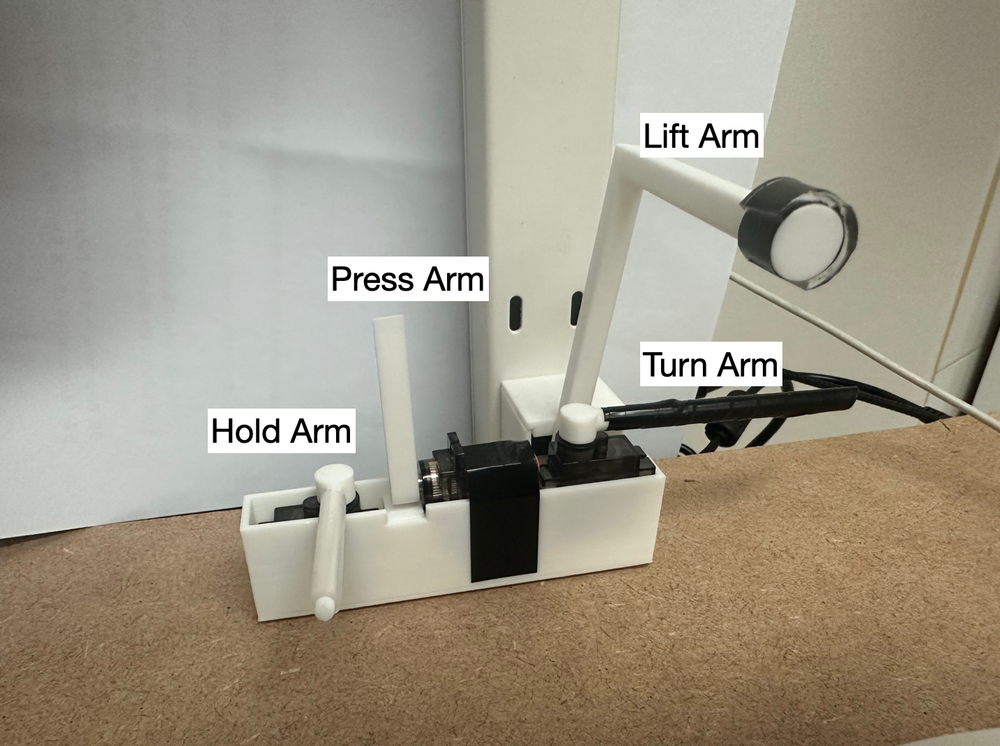
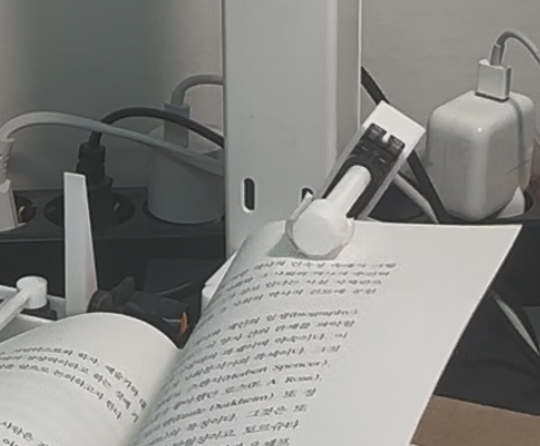
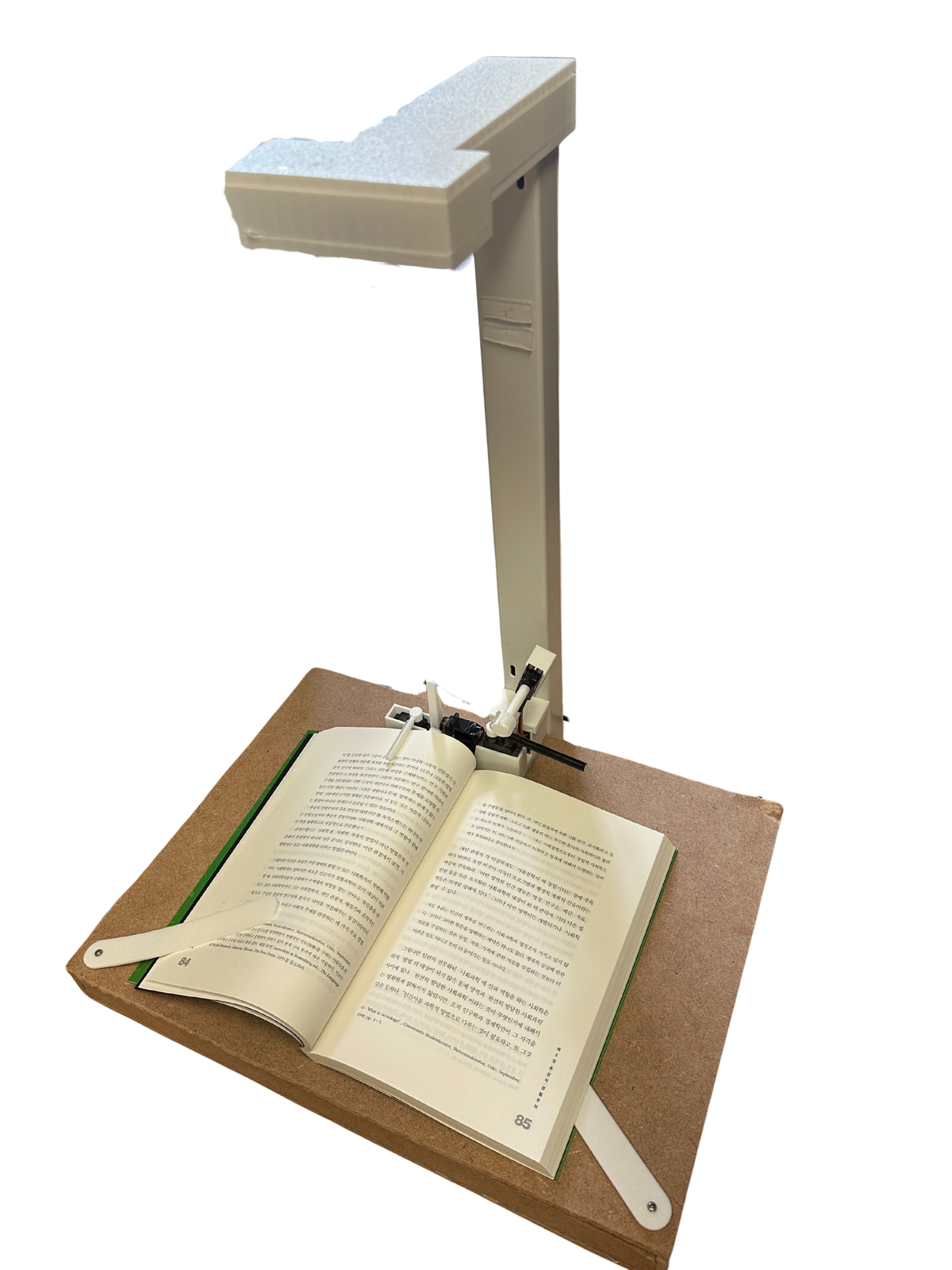
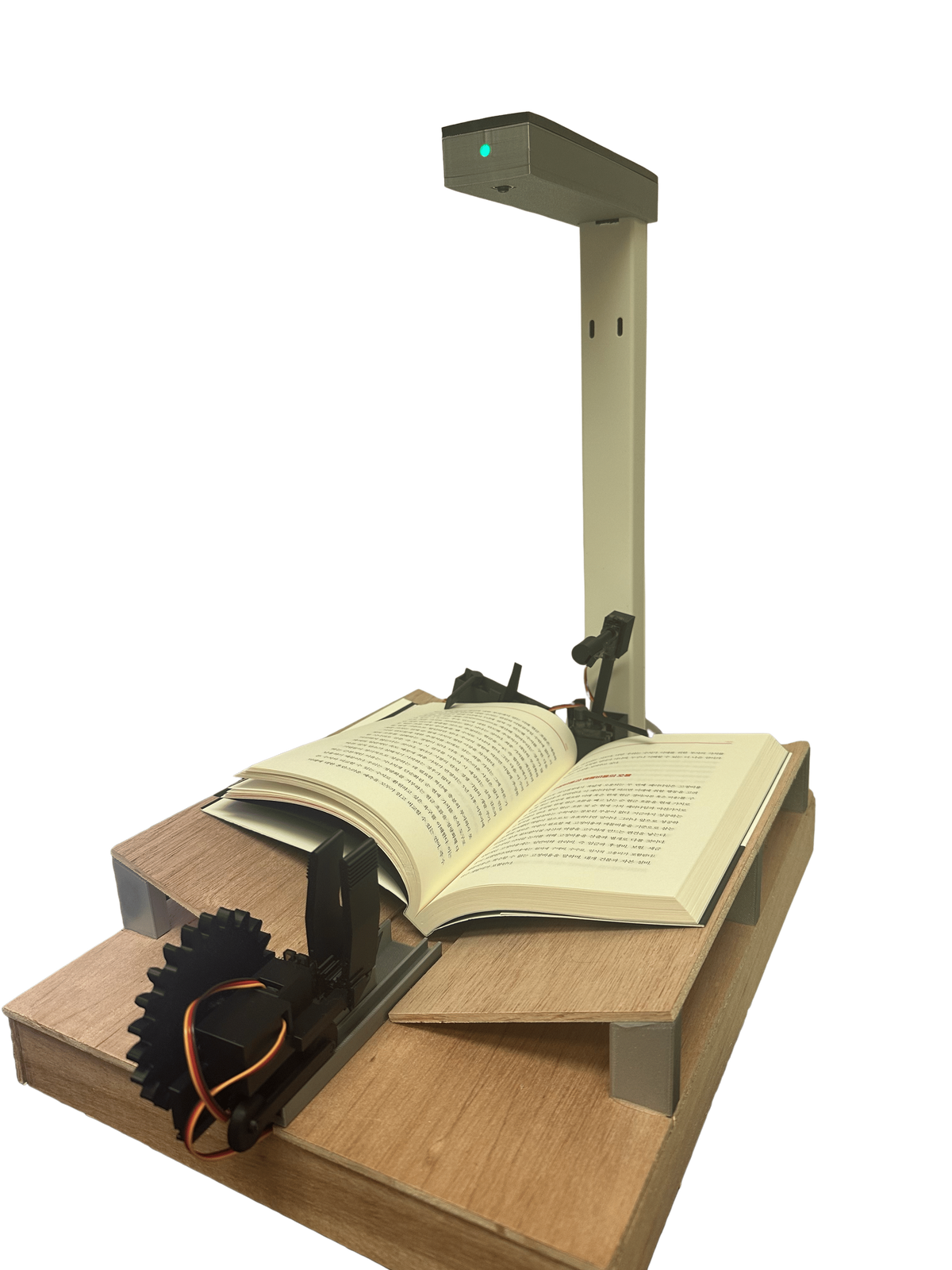
3. Mechanical & Optical System
| Category | Specification |
|---|---|
| Page Turning Mechanism | Multi-servo system: Lift, Turn, Press, Hold, V-Press |
| Degrees of Freedom | 7 DOF |
| Page Lifting Method | Silicone gel pad + pressure control |
| Motion Accuracy | ±1.0° alignment |
| Camera Module | Raspberry Pi Camera Module v3 |
| Resolution | 12 MP (4608 × 2592 px) |
| Auto Focus | Yes |
| Lens FOV (H × V) | 66° × 41° |
4. Hardware Specifications
| Category | Specification |
|---|---|
| Device Weight | 2.5 kg |
| Dimensions (Operating) | 450 × 300 × 450 mm |
| Dimensions (Folded) | 150 × 300 × 450 mm |
| Power Input | 5V / 6A + 5V / 2A |
| Supported Book Sizes (H × W × T) | 210–250 × 140–170 × 10–20 mm |
5. Manufacturing & Cost
| Category | Specification |
|---|---|
| Production Cost (BOM + Assembly) | 200,000 KRW (~$150) |
| Price | 300,000 KRW |
| Assembly Time | ~75 minutes |
| BOM Part Count | ~40 components |
최종적으로 원가 20만원, 판매가 30만원, 생산 시간 75분을 달성하였다. 생산 시간이 240분에서 75분까지로 많이 줄였다. 반대로 원가는 8만원에서 20만원까지 꾸준히 증가하는 모습을 보여주고 있다. 원가 절감이 쉽지 않다. 보통 어떤 문제가 해결이 안될 때 돈을 더 쓰면 해결이 되는 경우가 많았다.
6. BOM
| 분류 | 품목 | 가격(원) |
|---|---|---|
| 💻 제어 보드 | Raspberry Pi 3 B+ | 61,050 |
| 💽 저장 장치 | SanDisk microSD 32GB | 6,100 → 10,290 |
| 🎥 카메라 | 라즈베리파이 카메라 모듈 v3, FFC케이블 1m | 38,000 + 6,460 = 44,460 |
| 💡LED | RGB LED 모듈 | 240 |
| ⚙️ 구동부 | MG90S 서보모터 ×7 | 14,000 |
| 🔌 전원 | DC 5V 6A 어댑터 (TY0506000Z1MN) + DC 5V 2A 어댑터 + MicroUSB 케이블 1m | 15,800 + 7,930 = 23,730 14,000 + 3,600 + 4,330 = 21,930 |
| 🧠 회로/케이블 | 점퍼 케이블, WAGO 221-420, 터미널 블록 잭 | 200x17 + 2000x2 + 220x2 = 7,840 |
| 🏗 프레임 | 일반합판 (아래 외주 맡기는 방법 문서 참고) | 33,000 |
| 🏗 구조물 | PVC 닥트 40×30mm (0.5m) | 1,300 |
| 🧵 재료 | BambuLab PLA Basic | 5,000 |
| 🔥 방열 | 라즈베리파이3 B+ 구리 방열판 | 1,900 |
| 총합 | 201,010 |
Chapter 2. Kiro 변천사
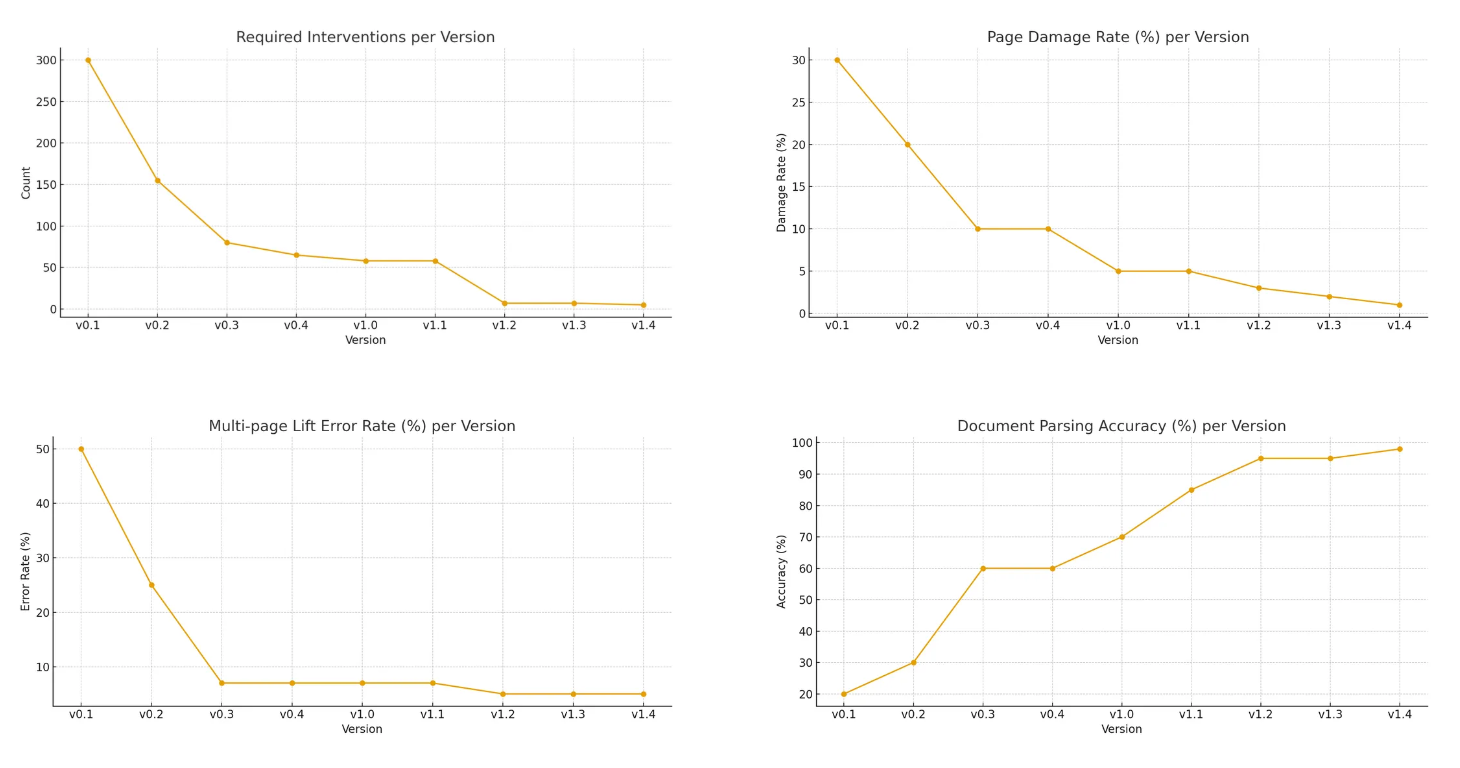
각 버전에서의 Kiro 업데이트는 각 키로 릴리즈 노트에서 모두 확인할 수 있다. 지난 5개월을 요약하는 이 챕터에서는 고객 관점에서 제일 중요한 지표 4개로 지난 버전들을 평가해보고자 한다. 해당 4개 지표는 책 한 권 스캔 시 사람의 필요 간섭 횟수, 페이지 파손율, 멀티 페이지 에러율, 파싱 정확도이다.
Page Turning Speed, Book to eBook Total Processing Time, False Positive Flip Detection은 분명 중요한 지표이지만 앞 2개는 다른 주요 4개 지표를 향상시키기 위해 희생되다 보니 중요도가 밀리고, 마지막 1개는 v1.0에서 탐지 시스템이 만들어지면서 한번에 팍 개선되어 제외하였다.
v0.1
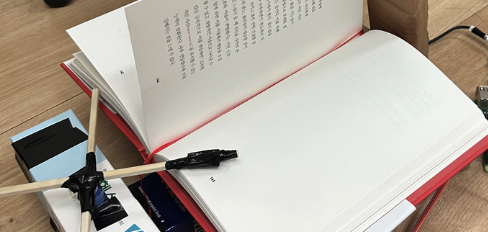

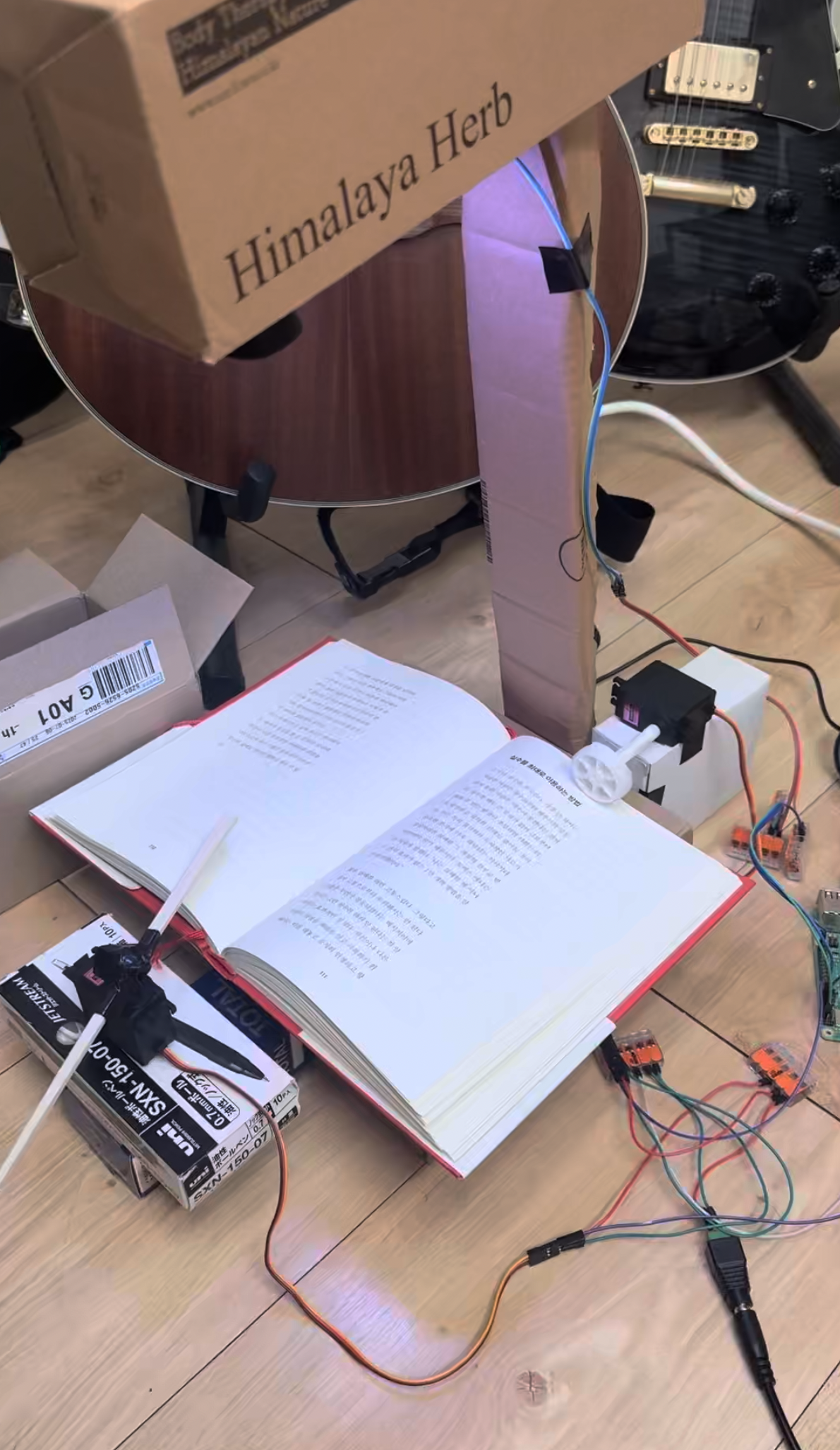
단일 자유도로 책의 아래쪽에서 접착력 있는 프로펠러가 돌면서 넘기는 형태였다.
- Required Interventions: 300
- 거의 모든 페이지마다 위치를 조절하고 실패 여부를 직접 확인하고 다시 돌려줘야 했다. 높이가 아주 크리티컬해서 10페이지 이상 넘기면 높이가 안 맞아서 절대 넘길 수 없어 매번 조절해줘야 했다. 애초에 v0.1의 목표가 "1페이지 자동으로 넘기기"이기도 했다.
- Page Damage Rate: 30%
- 현재 상태 모르고 프로펠러가 계속 돌다 보니 3번 중 1번은 책이 난리가 나버리게 된다.
- Multi-page Lift Error Rate: 50%
- 한 장을 딱 떼어내고 넘기는 방식이 아니라 위에서 밀어버리는 방식이라 어지간하면 2-3페이지 넘어간다고 봐야 했다.
- Document Parsing Accuracy: 20%
- Logitech C270 웹캠을 사용하다 보니 화질이 많이 떨어지고 사진 찍을 때 멈춰 있는 것이 보장이 안되어 있어서 초점이 안 맞을 때가 너무 많아 Document Parsing이 거의 불가능했다.
v0.2

디스크를 추가해 총 2 자유도로 하나는 종이를 들고 다른 하나는 넘기는 형태였다.
- Required Interventions: 155 = 60 + 15 + 50 + 30
- 디스크의 높이 조절이 불가능해 책의 높이 조절을 수동으로 해줘야 했다. 한번 높이를 맞추면 약 5페이지 정도 넘길 수 있었다. 한번에 5페이지 정도 넘겨서 이론상 60번 정도면 되지만 책을 넘기다 보면 넘긴 페이지가 돌아오거나 아직 안 넘긴 페이지들이 다 함께 넘어가는 문제가 있었다. 이를 가상의 intervention 횟수로 전환하면 넘긴 페이지들은 10번마다 북홀더로 고정해주고 안 넘긴 마지막 50장은 매번 북홀더로 고정해둔다고 하면 약 15 + 50으로 가정할 수 있다. 다만 넘긴 페이지를 10번마다 고정해준다 하더라도 그 안에 다시 돌아오는 경우도 종종 생겨서 30을 추가했다.
- Page Damage Rate: 20%
- 프로펠러 속도가 조금 더 느리고 따로 들어주는 디스크가 있어서 v0.1보다 낫긴 했지만 여전히 종이 파손되기 쉬웠다.
- Multi-page Lift Error Rate: 25%
- 디스크 형태다 보니 책을 미는 형태라 페이지끼리의 마찰력이 극대화되어 2-3페이지 이상 넘어가는 일이 4번 중 1번 꼴로 발생했다.
- Document Parsing Accuracy: 30%
- v0.1보단 덜 흔들렸지만 책의 복원력으로 인해 넘긴 페이지가 딱 안 펴지고 나풀나풀 거리는 현상이 많이 발생했다.
v0.3
v0.2에서 넘긴 페이지들을 고정해주기 위한 홀드암이 추가되어 리프트암, 턴암, 홀드암 3 자유도 체제를 갖게 되었다.
- Required Interventions: 80 = 15 + 15 + 50
- 한 번에 10번 정도는 넘길 수 있게 되었고 책의 높이 조절을 더 이상 안해도 되었다. 모든 게 완벽하면 2-30장도 넘기지만 중간에 테이프에서 안 떨어지거나 홀드가 제대로 안 되거나 하는 문제가 꾸준히 발생했다. 홀드암의 홀드 힘이 약해 페이지를 많이 넘겼을 경우 원래대로 돌아와 덮이는 일도 많이 발생했다. 별도의 북홀더를 두고 10장마다 한번씩 고정시켜줘야 했다. 오른쪽은 마지막 50장은 매번 하나씩 북홀더로 고정해준다고 가상으로 intervention 횟수로 전환했다.
- Page Damage Rate: 10%
- 위로 볼록하게 종이가 들리지 않고 아래로 볼록하게 들리면 거의 무조건적으로 턴암이 돌 때 종이가 구겨지면서 파손이 일어났다.
- Multi-page Lift Error Rate: 7%
- 리프트암이 종이를 수직으로 들게 되는 구조로 바꾸게 되면서 여러 페이지를 넘기는 일이 대폭 감소했다. 다만 책이 누워 있을 때 위로 볼록한 구조다 보니 턴암이 같이 넘기는 경우가 간혹 발생했다.
- Document Parsing Accuracy: 70%
- 홀드암을 통해 고정이 되면서 꽤나 괜찮은 사진을 찍을 수 있었다. 또한 document parsing 및 전자책 변환 알고리즘을 개선했다. 100% 기준으로 생각해보면 홀드암과 리프트암이 가리는 부분으로 5% 정도 떨어지고 카메라 화질 이슈로 15% 정도 떨어지고 PaddleOCR 성능 이슈로 15% 정도 떨어져 체감상 약 70% 정도의 정확도였었다.
v0.4
홀드암 하나로는 넘긴 페이지들이 다시 돌아오려는 복원력을 감당할 수 없었다. 힘의 방향과 모터의 방향이 직교하도록 홀드암을 바꾸고 직전에 넘긴 한 페이지를 누르는 프레스암을 추가하여 자유도 4가 되었다.
- Required Interventions: 65 = 15 + 50
- 홀드암을 통해 넘긴 페이지를 더 이상 따로 고정하지 않아도 되게 되어 15가 감소했다.
- Page Damage Rate: 10%
- 직전 버전과 동일
- Multi-page Lift Error Rate: 7%
- 직전 버전과 동일
- Document Parsing Accuracy: 70%
- 직전 버전과 동일
v1.0
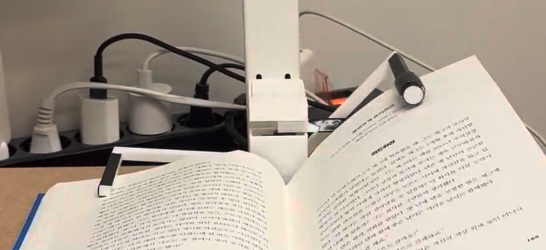
리프트암 익스텐션 모터가 생겨 종이를 위로 볼록하게 들 수 있도록 하고 턴암과 함께 떼어내지도록 하였다. 자유도 5가 되었다.
- Required Interventions: 58 = 8 + 50
- 책을 넘길 때 턴암이 훨씬 더 안정적으로 넘길 수 있게 되었고 리프트암에서부터 종이가 잘 떼어지게 되었다. 여전히 책 뒤쪽 부분은 매번 잡아줘야 했다.
- Page Damage Rate: 5%
- 리프트암 익스텐션의 존재로 종이가 무조건 위로 볼록해져 턴암이 넘길 때 파손되는 일이 거의 없어졌다. 암들이 복잡하게 움직이다가 잘못 꼬이는 경우 파손되고, 테이프에 종이가 붙어서 파손되는 2가지 케이스가 남아있다.
- Multi-page Lift Error Rate: 7%
- 직전 버전과 동일
- Document Parsing Accuracy: 70%
- 직전 버전과 동일
v1.1
- Required Interventions: 58
- 직전 버전과 동일
- Page Damage Rate: 5%
- 직전 버전과 동일
- Multi-page Lift Error Rate: 7%
- 직전 버전과 동일
- Document Parsing Accuracy: 85%
- 카메라 업그레이드를 하여 15% 정도 상승했다.
v1.2
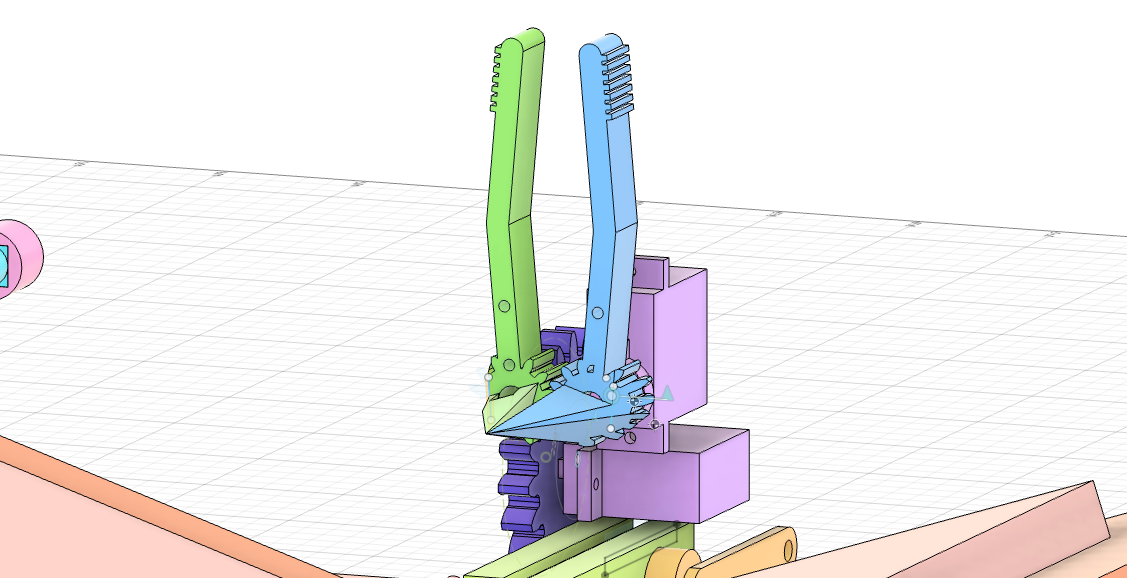
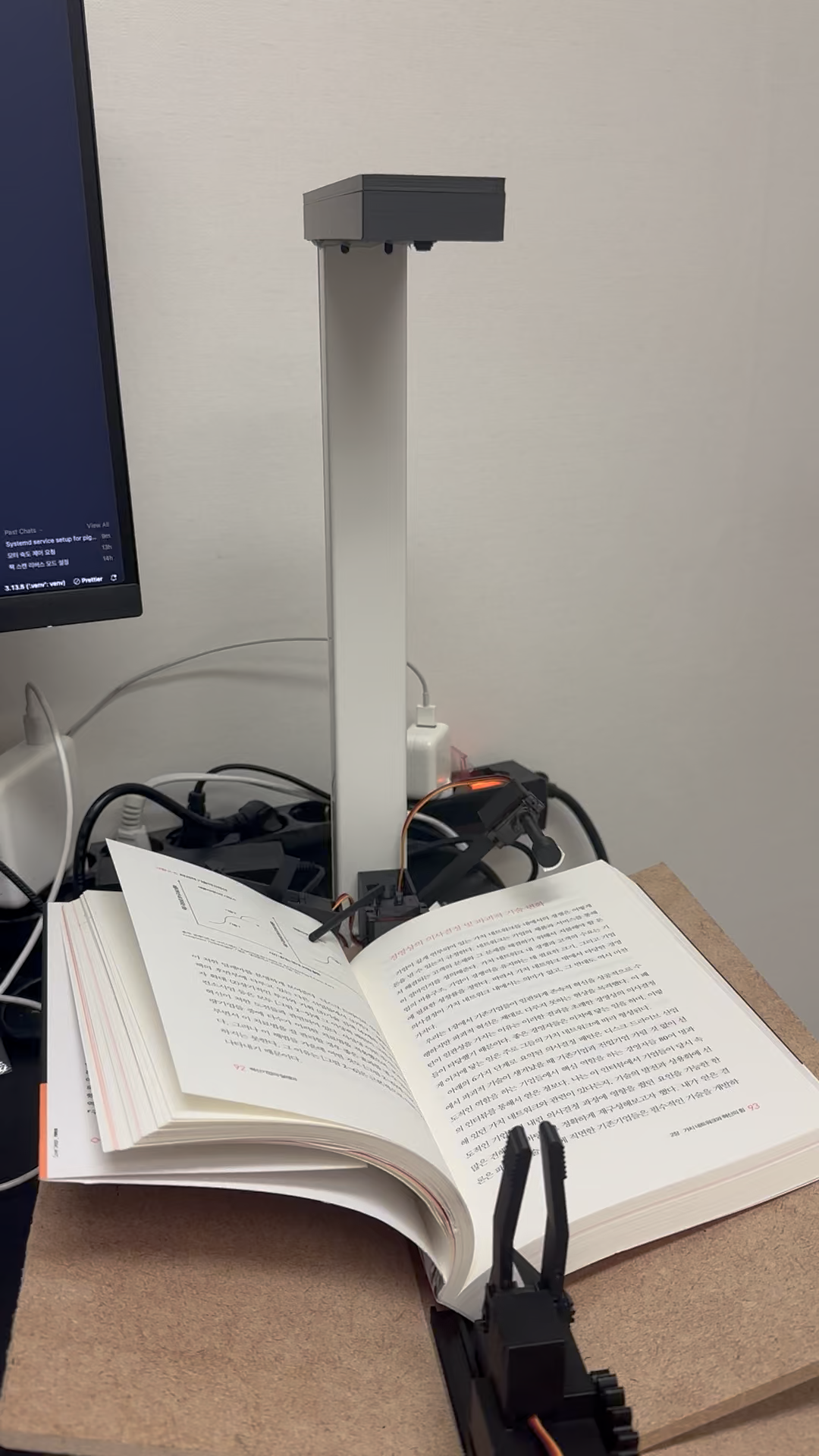
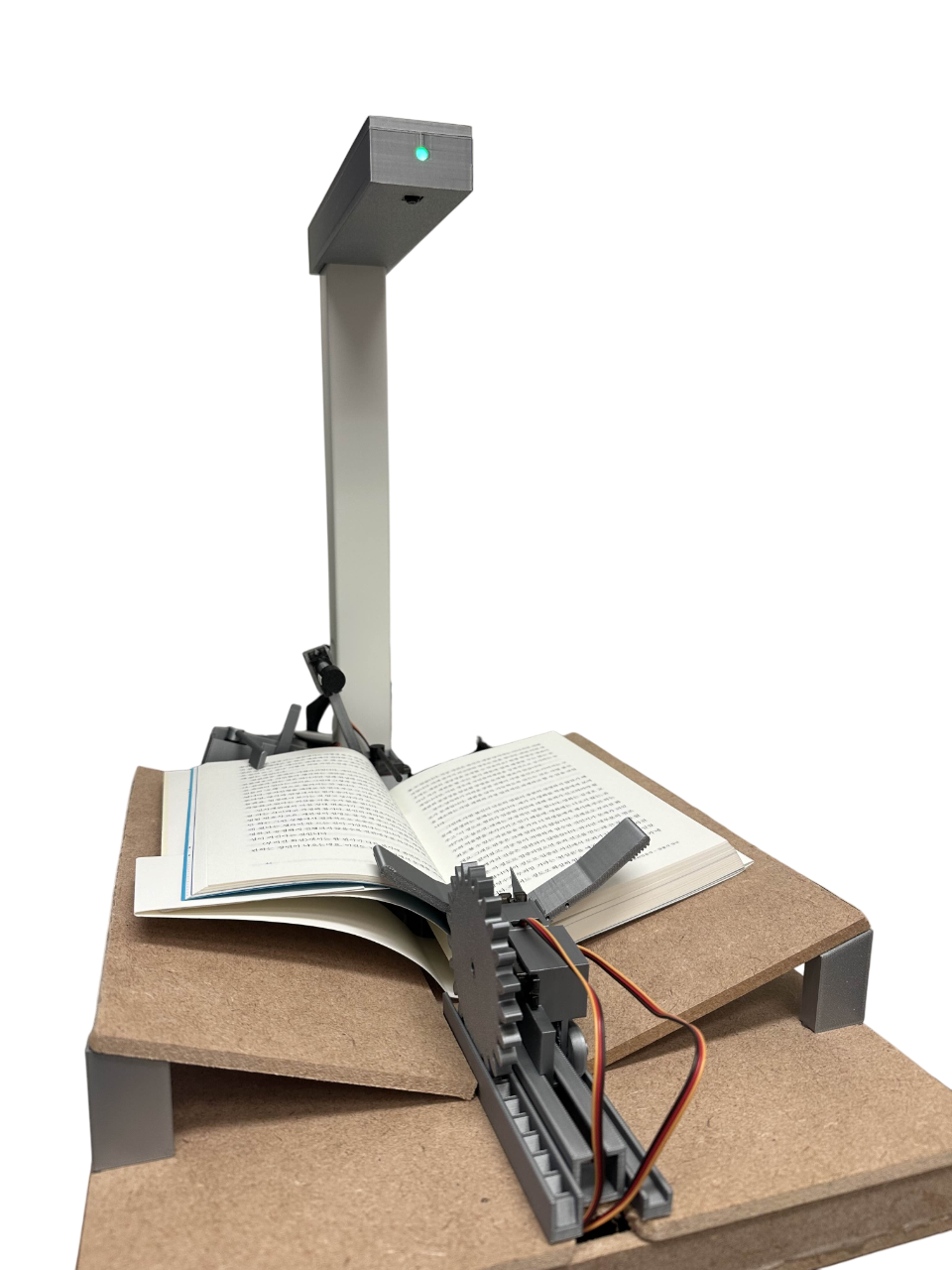
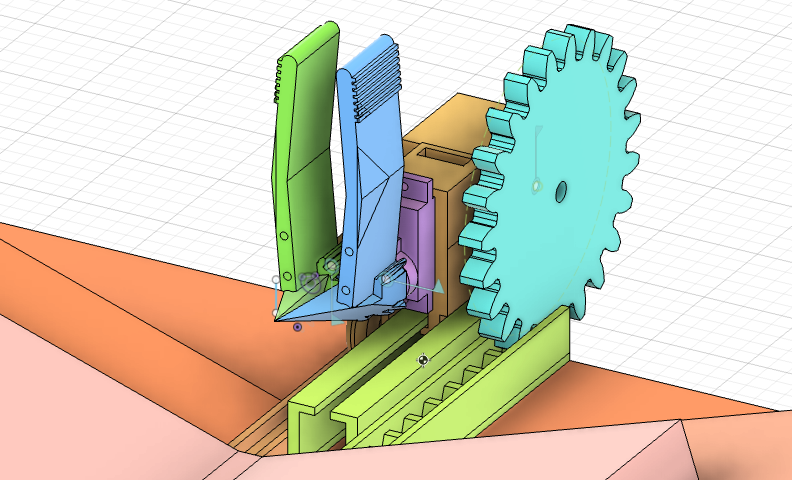
책을 양옆으로 눌러주는 V Press Arm이 생기면서 자유도는 7이 되고 스캔 안정성 및 정확도를 대폭 올라갔다.
- Required Interventions: 7 = 5 + 2
- 책을 양옆으로 눌러주는 V Press Arm이 생기고 책을 뒤집어서 스캔하는 역방향 스캔 모드가 생겼다. 역방향 스캔 모드로 인해 책의 마지막 부분을 하나씩 잡아주면서 스캔하는 것이 아니라 책을 뒤집어서 아예 뒤에서부터 다시 시작하는 방법으로 해결할 수 있었다.
- Page Damage Rate: 3%
- 수많은 테이프를 실험하여 파손이 제일 적으면서도 안정적으로 종이를 드는 테이프를 찾았다.
- Multi-page Lift Error Rate: 5%
- 책을 받쳐주는 V Cradle이 생겨 5%까지 떨어졌다.
- Document Parsing Accuracy: 95%
- 책을 쭉 펴주는 V Press Arm이 생김으로써 책등 쪽의 글자가 이제 다 인식할 수 있게 되어 약 10% 가량 더 올랐다.
v1.3

- Required Interventions: 7
- v1.2와 유사하지만 훨씬 더 넓은 범위의 책에 대해서 간섭 횟수 7 정도를 지원하게 되었다. 다양한 세로 길이의 책에 대해서 가능해졌다.
- Page Damage Rate: 2%
- 프레스암이 누를 때 파손되는 일을 방지했다.
- Multi-page Lift Error Rate: 5%
- 직전 버전과 동일
- Document Parsing Accuracy: 95%
- 직전 버전과 동일
v1.4
- Required Interventions: 5
- 전반적인 시스템, 제어의 디테일들을 손봐 살짝 더 개선하였다. 리프트암팁 재료를 변경하여 테이프 교체가 아닌 물티슈로 닦기로 훨씬 쉬워졌다. 현재 5에서 4는 물티슈로 닦는 것이고 나머지 1은 역스캔으로 교체하는 것이다. 이 이하로 줄이기 위해서는 완전히 다른 접근 방법이 필요하다.
- Page Damage Rate: 1%
- 리프트암팁 재료를 테이프가 아니라 실리콘 젤 패드로 변경하여 테이프로 인한 종이 파손 문제를 완벽히 해결하였다. 남은 1%는 암들이 복잡한 시스템대로 움직이다가 하나가 꼬여 종이가 끼어버리면서 파손되는 상황이다.
- Multi-page Lift Error Rate: 5%
- 직전 버전과 동일
- Document Parsing Accuracy: 98%
- 카메라를 5MP에서 12MP로 올렸다. 또한 Upstage Document Parse를 통해 이미지 추출도 가능하게 되었다.
요약
| Version | Required Interventions | Page Damage Rate | Multi-page Lift Error Rate | Document Parsing Accuracy |
|---|---|---|---|---|
| v0.1 | 300 | 30% | 50% | 20% |
| v0.2 | 155 | 20% | 25% | 30% |
| v0.3 | 80 | 10% | 7% | 60% |
| v0.4 | 65 | 10% | 7% | 60% |
| v1.0 | 58 | 5% | 7% | 70% |
| v1.1 | 58 | 5% | 7% | 85% |
| v1.2 | 7 | 3% | 5% | 95% |
| v1.3 | 7 | 2% | 5% | 95% |
| v1.4 | 5 | 1% | 5% | 98% |
기타
짧게 여러 관점에서도 지난 릴리즈를 요약해보고자 한다.
자유도(Degree of Freedom; DOF): v0.1 (1) → v0.2 (2) → v0.3 (3) → v0.4 (4) → v1.0 (5) → v1.2 (7)
화질(Resolution): v0.1 (로지텍웹캠; HD720) → v1.1 (라즈베리파이 카메라 모듈 v1; 5MP) → v1.4 (라즈베리파이 카메라 모듈 v3; 12MP)
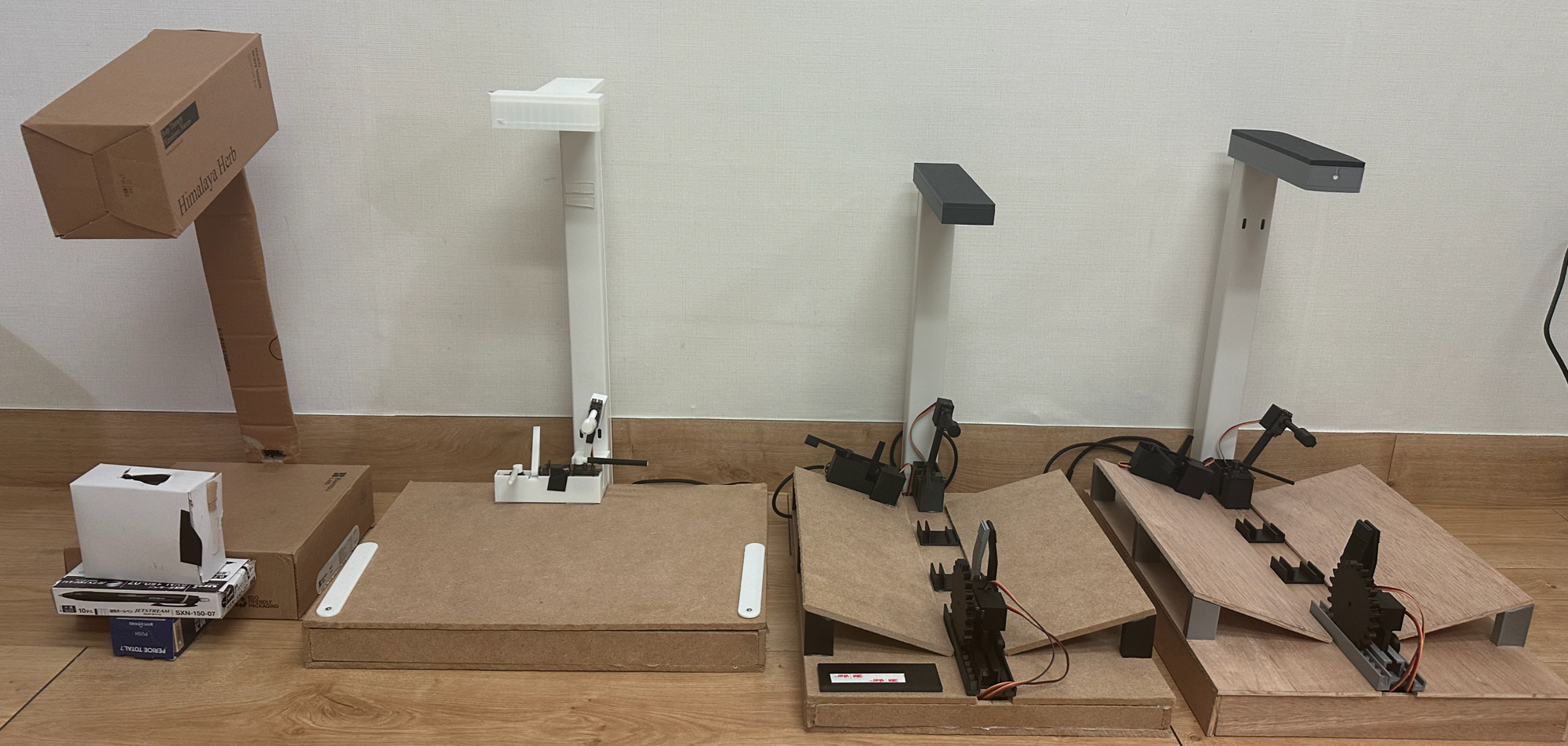
바디(Body): v0.1 (종이박스) → v0.3 (MDF + PVC닥트 + PLA) → v1.4 (합판 + PVC닥트 + PLA)
v0.1: 첫 종이 넘기기 성공
v0.2: 첫 설계 & 첫 3D 프린팅
v0.3: 첫 MDF 가공, 디시전로깅 & 라벨링 시스템 개발, 첫 제어 시스템 개발
v0.4: Wifi 연결, 첫 배포, 스튜디오 개발
v1.0: 첫 생산, 배송, 판매
v1.1: 스토어 등록
v1.2: 첫 디지털 트윈 (물리법칙은 없는), 첫 기어 & 랙앤피니언 설계
v1.3: X
v1.4: 첫 외주, 상태 표시등
Chapter 3. Kiro 레슨런
원래 생각과 현재 생각이 일치하는 레슨런
아래 내용들은 태호의 인생 원칙 중 5가지이다. Kiro를 하면서 아래 5개는 정말 중요하고 앞으로 더 지켜야겠다는 확신이 들었다.
1. 중요한 문제를 풀어라.
너무나 당연한 말처럼 보이지만 사실 쉽지 않다. 중요한 문제일 수록 하는 사람이 많기 마련이고 내가 그 안에서 경쟁해야 한다는 생각 때문에 계속 밖으로 빠지게 된다. 그러다 보면 아무도 안하고 어떤 누구의 문제도 해결하지 못하는 사소한 문제를 붙잡고 스타트업을 시작하게 된다. 중요한 문제를 찾아야 한다.
Kiro 맨 처음 구상했을 때 e북카페 회원님들의 열정적인 반응이 없었다면 절대 Kiro를 시작하지 않았을 것이다. 문제를 느끼는 사람이 많진 않아도 그 사람들에게 이 문제는 매우 중요한 문제였다.
2. 경쟁하지 말고 독점하라.
정말 다시 생각해봐도 피터 틸의 이 한 문장이 갖는 인사이트는 어마어마하다. 경쟁하는 순간 나의 목표는 고객에게 가치 주기가 아닌 저 사람 이기기로 바뀐다. 정말 아무 의미 없다. 경쟁하지 말고 나의 목표에 집중하고 나만의 시장을 만들어가야 한다.
자동북스캐너 시장은 아무도 없었다. 나만의 시장을 잘 찾았고 잘 만들기만 하면 경쟁하지 않는 시장이다.
3. 팔고 만들어라.
문라이트 때부터 절실히 느낀 "팔고 만들어라"이다. 엔지니어링 기반 창업자들에게 이 한 문장만으로도 2-3년의 수고를 덜 수 있을 것이라 생각한다. 먼저 판다는 것이 실제로 팔 필요는 없지만 그만큼 고객을 더 만나고 이 문제의 크기, 얼마까지 낼 수 있을지, 이 문제의 중요도 등을 파악하여 "이거 만들기만 하면 무조건 팔린다"라는 확신을 갖는 것이 중요하다.
4. 도전적인 목표를 세워라.
도전적인 목표를 세워야 한다. 도전적이지 않으면 현재의 습관이나 방식을 업그레이드할 시도를 못하게 된다. 하드웨어도 나에게 도전이었고, 1억을 올해 벌겠다는 목표도 도전이었다. 이 세상에 없던 자동북스캐너를 만드는 것도 큰 도전이었다. 이 도전을 했기에 배울 수 있고 성장할 수 있었다.
5. 매주 글을 써라.
개인적으로 최근 2-3년간 많이 쓰는 방법인데 길 걸어다니면서, 커피 마시면서, 버스 타면서 등등 컴퓨터를 안 켜고 있을 때 브레인스토밍을 많이 한다. 그리고 이것들을 모두 구조화할 때 글을 적으면서 구조화한다. 이렇게 하면 내가 브레인스토밍했던 것들이 모두 깔끔하게 기록으로 정리되고 그 구조 그대로 머릿속에 저장되어 있기에 기록 없이도 기억이 오래 가게 된다. 앞으로의 방향을 설계할 때 거의 매번 이런 형태로 하게 되는 것 같다. Kiro를 할 때도 매주 블로그를 쓰고 릴리즈 노트를 작성하는 것이 큰 도움되었다.
새로운 레슨런
- mechnical, electrical engineering도 engineering이다. 하면 된다.
- software engineering과 철학 자체는 동일하다. 필요한 학문이 다르긴 하지만 그건 그때그때 공부하면 된다.
- software처럼 디버거 툴들이 다 있다. 온도계, 멀티미터 등을 적극 활용하자.
- 하드웨어도 이터레이션 밟는 과정은 소프트웨어와 동일하다.
- 물리는 중요하고 재밌다.
- 물리의 필요성을 몸으로 이렇게 느낀 것은 처음이다. 역학, 전자기학이 학문으로서가 아니라 문제 이해를 위한 도구로 다가오니 훨씬 더 재밌고 중요성을 크게 느낀다.
- 하드웨어 할 만 하다.
- 소프트웨어 엔지니어링만 하던 사람들 하드웨어 내가 할 수 있을까? 라는 생각과 함께 도전하지 못하고 있다면 바로 도전해보세요! 생각보다 어려운데 생각보단 또 할 만 합니다.
- 소프트웨어가 최근 너무 급격한 발전으로 인해 하드웨어는 상대적으로 덜 지능적이다. 시장이 정말 무궁무진하다. 꿈꾸는 것을 다 해볼 수 있다. 기회의 땅이다.
- Physical, Digital, AI의 남탓하지 않는 유연한 협력
- 각자 역할을 모두 고정하고 협력하기보단 각자의 역할을 계속 조정해나가며 유연한 협력을 해야 한다. AI가 안되면 Physical 메커니즘으로 커버하고, 메커니즘으로 안되면 소프트웨어로 커버해보는 느낌이다.
+) Kiro 고객님들 진짜 최고였다. 매번 다 자상하게 피드백해주시고, 모자란 제품 다 구매해주시고, 믿어주고, 아이디어 주고 하셨다. 꼭 다녀와서 이 은혜 잊지 않고 더 완벽한 제품으로 다시 드려야지.
결론
Kiro 5개월 참 재밌게 만들었다. 원하던 목표인 1억 매출은 못 찍었지만 전역하고 나서 다시 1억 꼭 찍어본다!