Kiro Building Note 15
요약
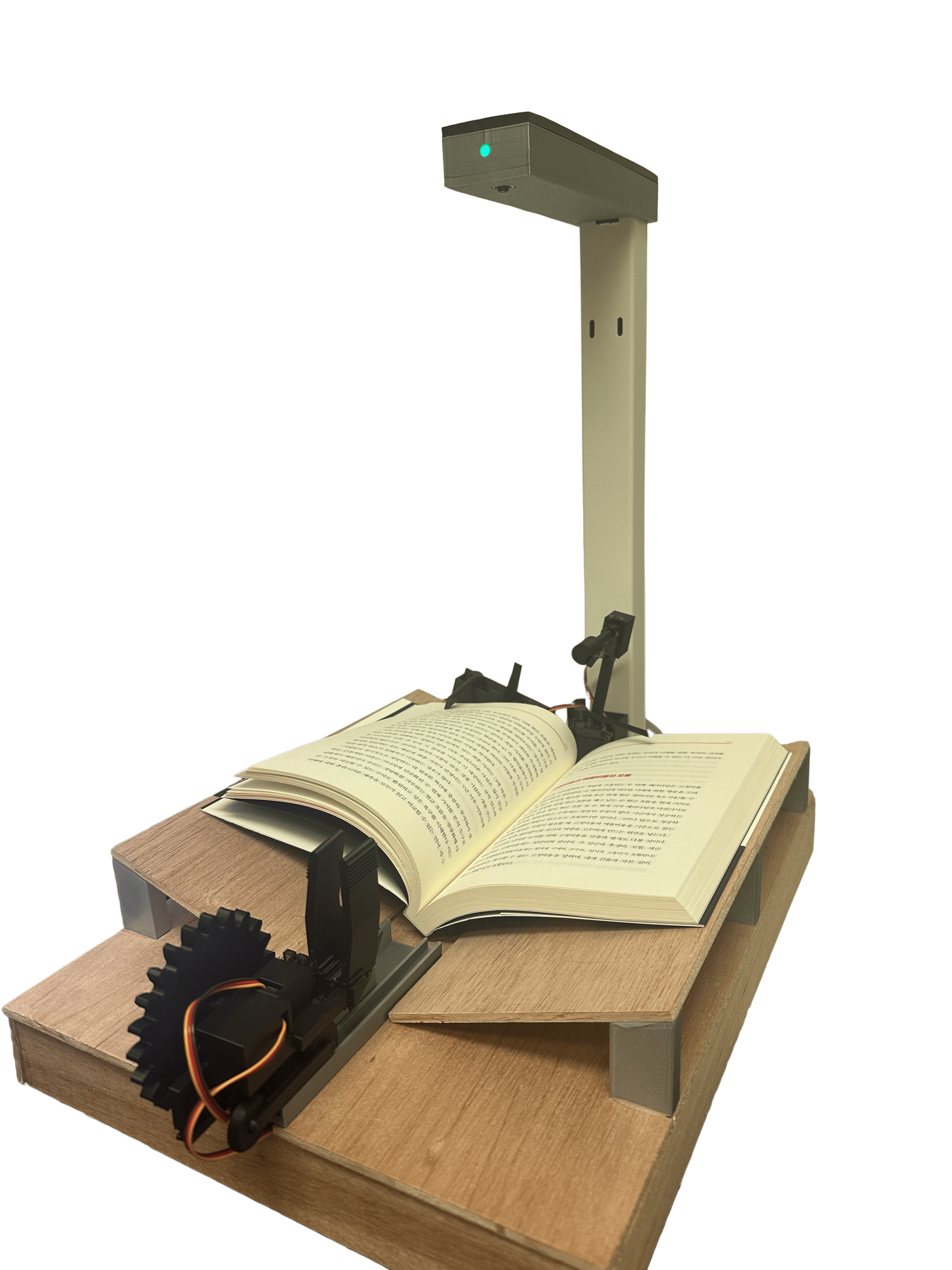
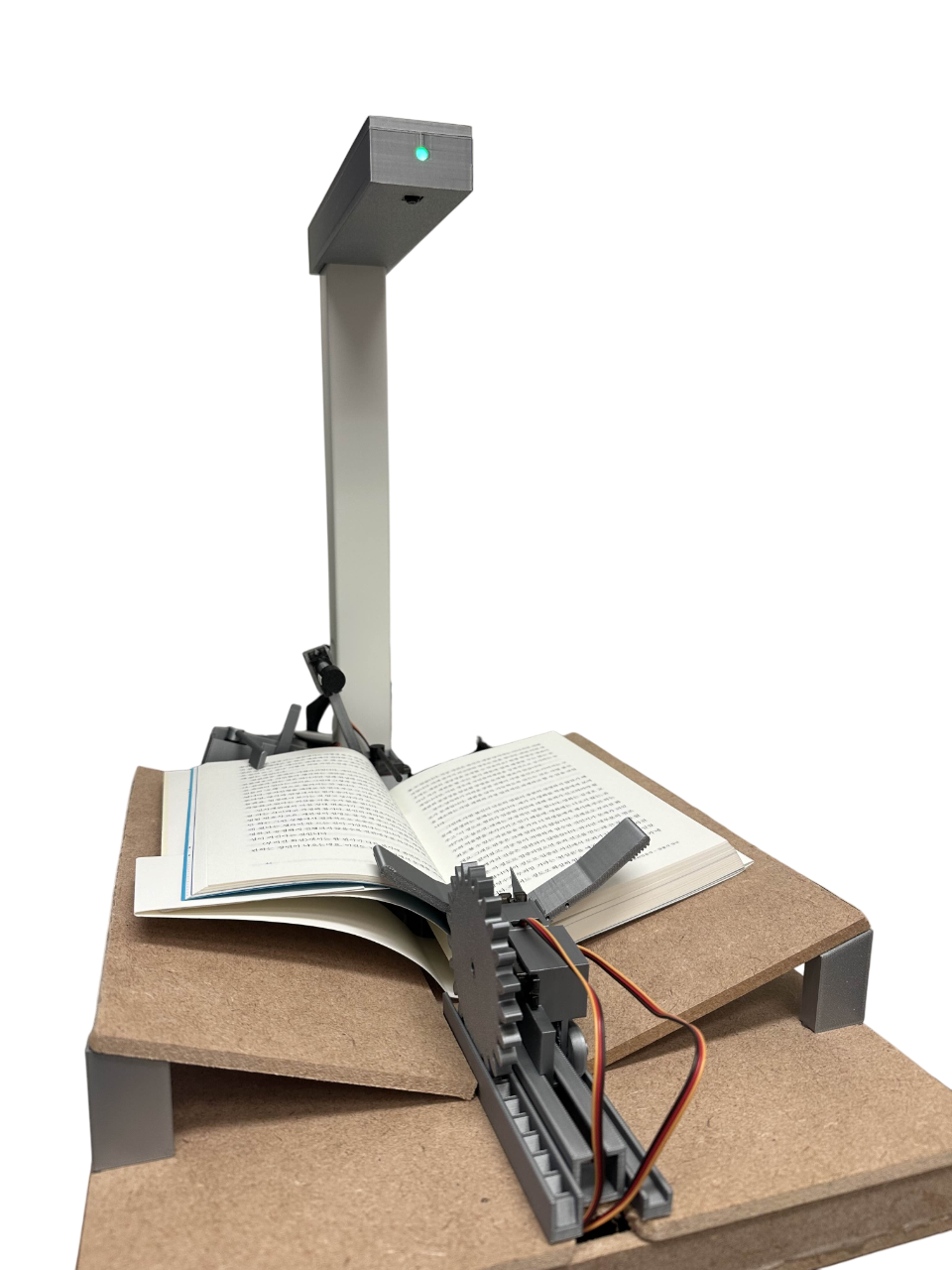
v1.3에서 메커니즘 5개, 개발 4개 더 하고! 파워 안정화시키고! KC인증 시료 내일 보내서 2-3주 내로 인증 따고! 배송할 준비까지 다 끝내보자!
10/31까지 다 해보자! 그럼 10월 목표 달성이다.
1 메커니즘
1.1 다양한 세로 길이의 책 지원
- 현재 세로 (21-23cm), 가로 (12~15cm), 두께 (~3cm)까지 지원
- 가로, 두께는 추후에
⇒ 피니언 크기 더 키우기
1.2 vpressarm 진입 시 가끔 넘긴 페이지 밑으로 들어감
- 위에서부터 아래로 눌러주는 방식으로 vpressarm 설계
1.3 레일로 인해 책 방향 틀어지지 않도록
- 중간에도 레일 붙여서 책등 딱 잡아주도록
1.4 프레스 암이 누를 때 종이 파손 위험 있음
- v-cradle arm housing에 1cm 패딩 추가
1.5 리프트암팁 내구성 향상
- 현재 테이프를 쓰는 것이 내구성이 낮음
- 어떻게 향상시킬까?!
2 개발
2.1 제어 고도화
- 리프팅 판단 정확도 95% 이상
- 터닝 판단 정확도 95% 이상
2.2 UX 개선
- 연결 끊겼을 때 카메라 초기화
- Wifi 연결 속도 향상
- 기타?
2.3 리프트 시도 횟수 줄이기
- 리프트 파라미터 업데이트 알고리즘 개선
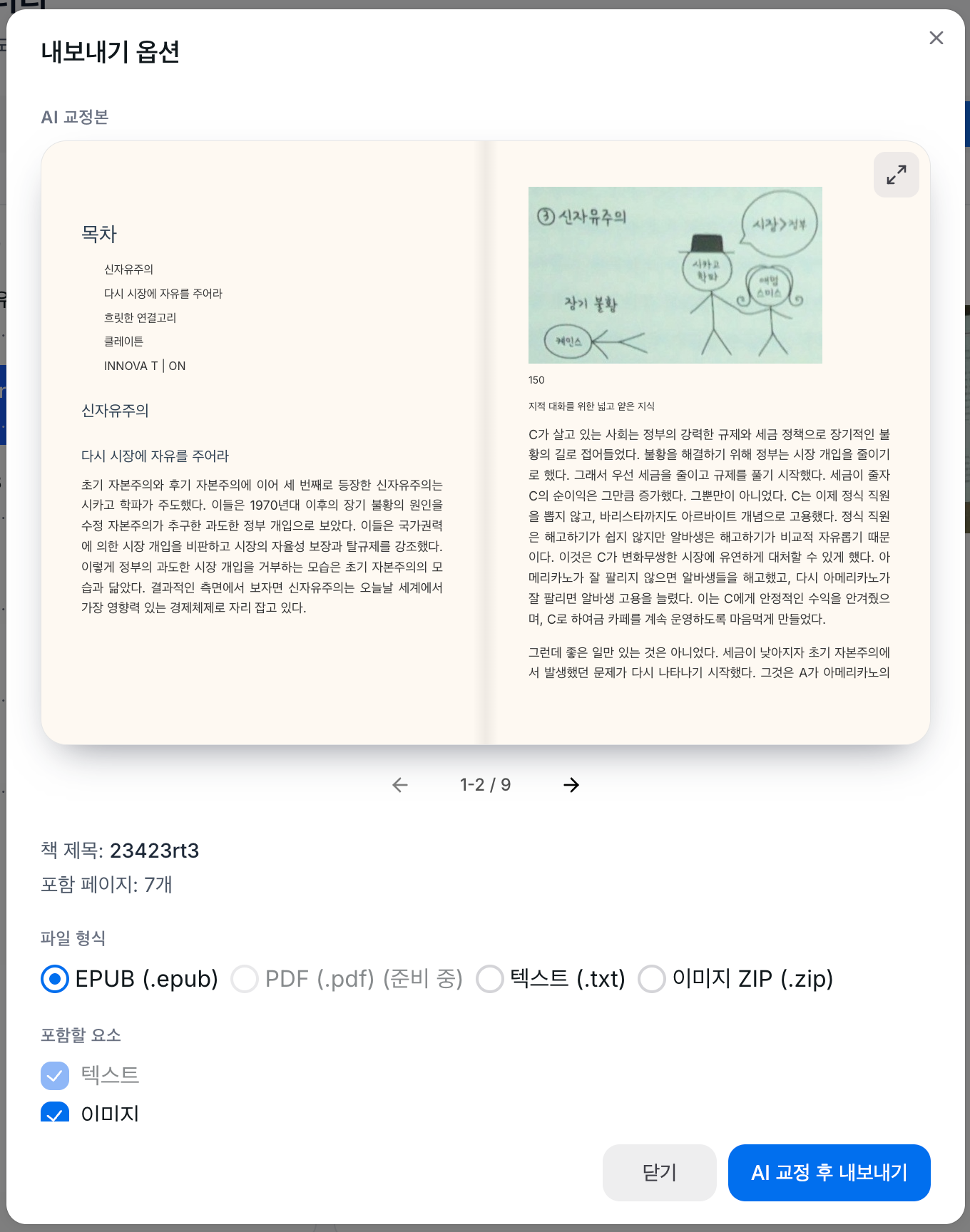
2.4 OCR
DeepSeek OCR: https://deepseekocr.app/
PaddleOCRVL: https://huggingface.co/spaces/PaddlePaddle/PaddleOCR-VL_Online_Demo
PaddleOCR-PP: https://huggingface.co/spaces/PaddlePaddle/PP-StructureV3_Online_Demo
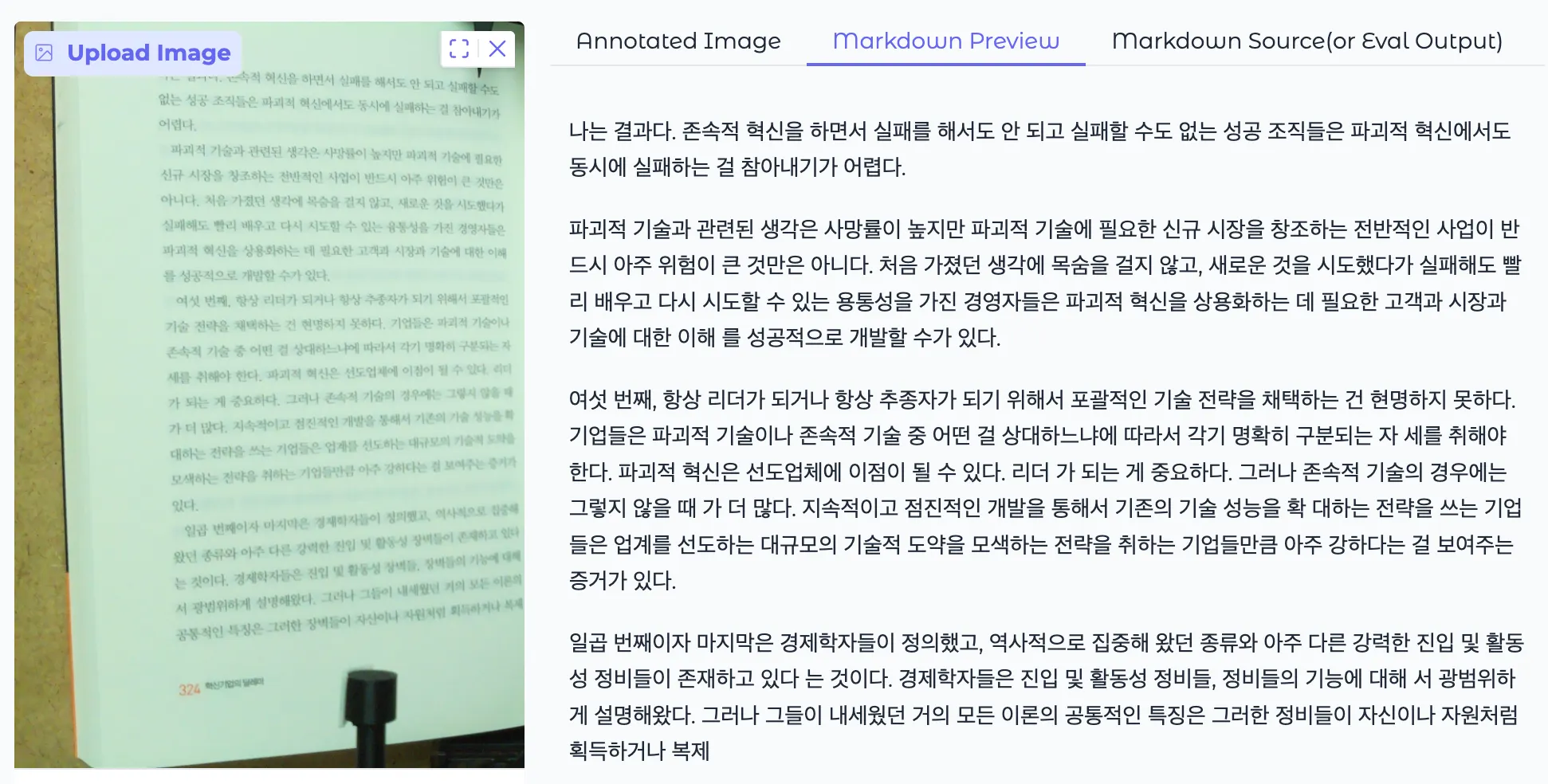
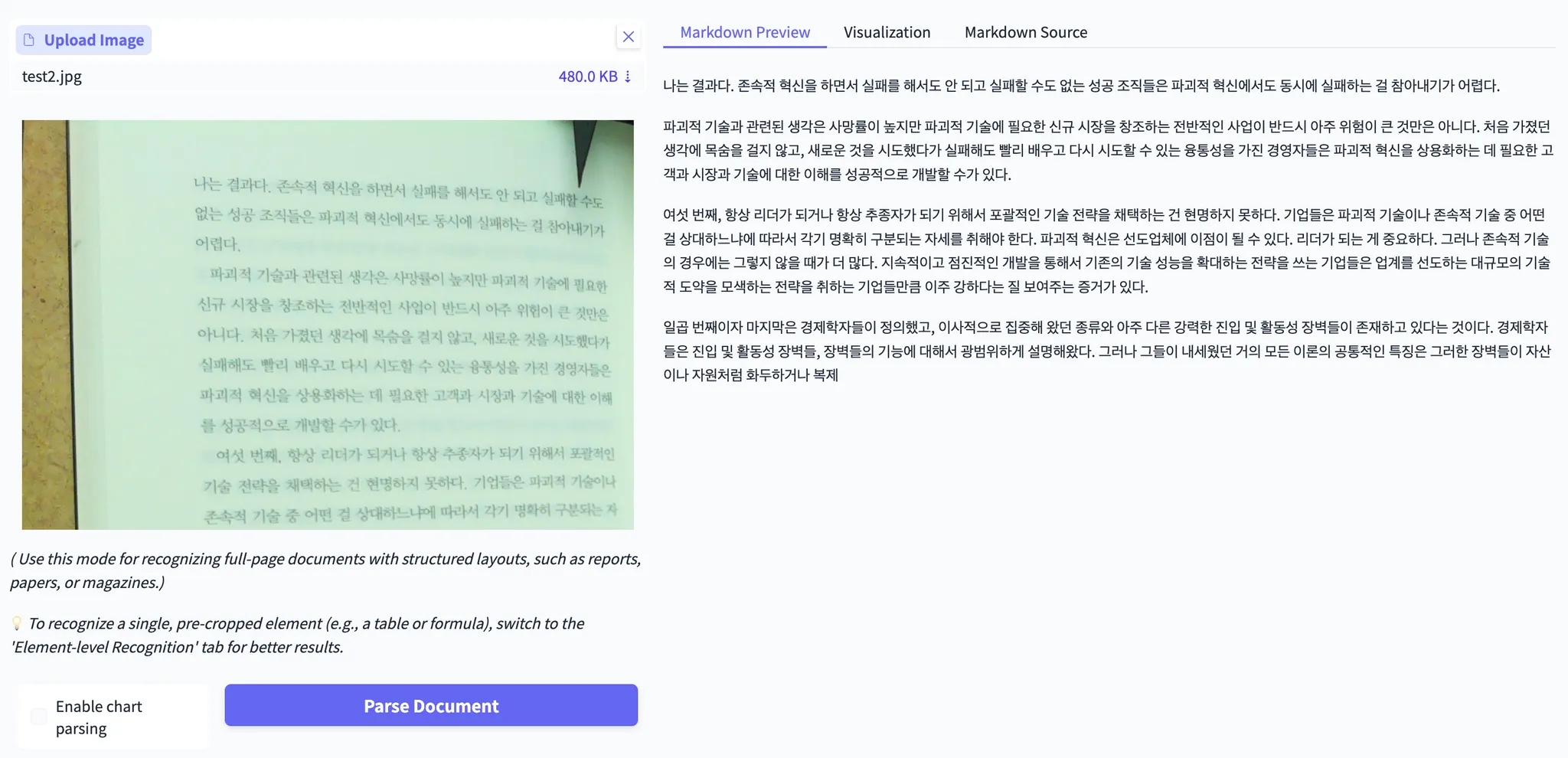
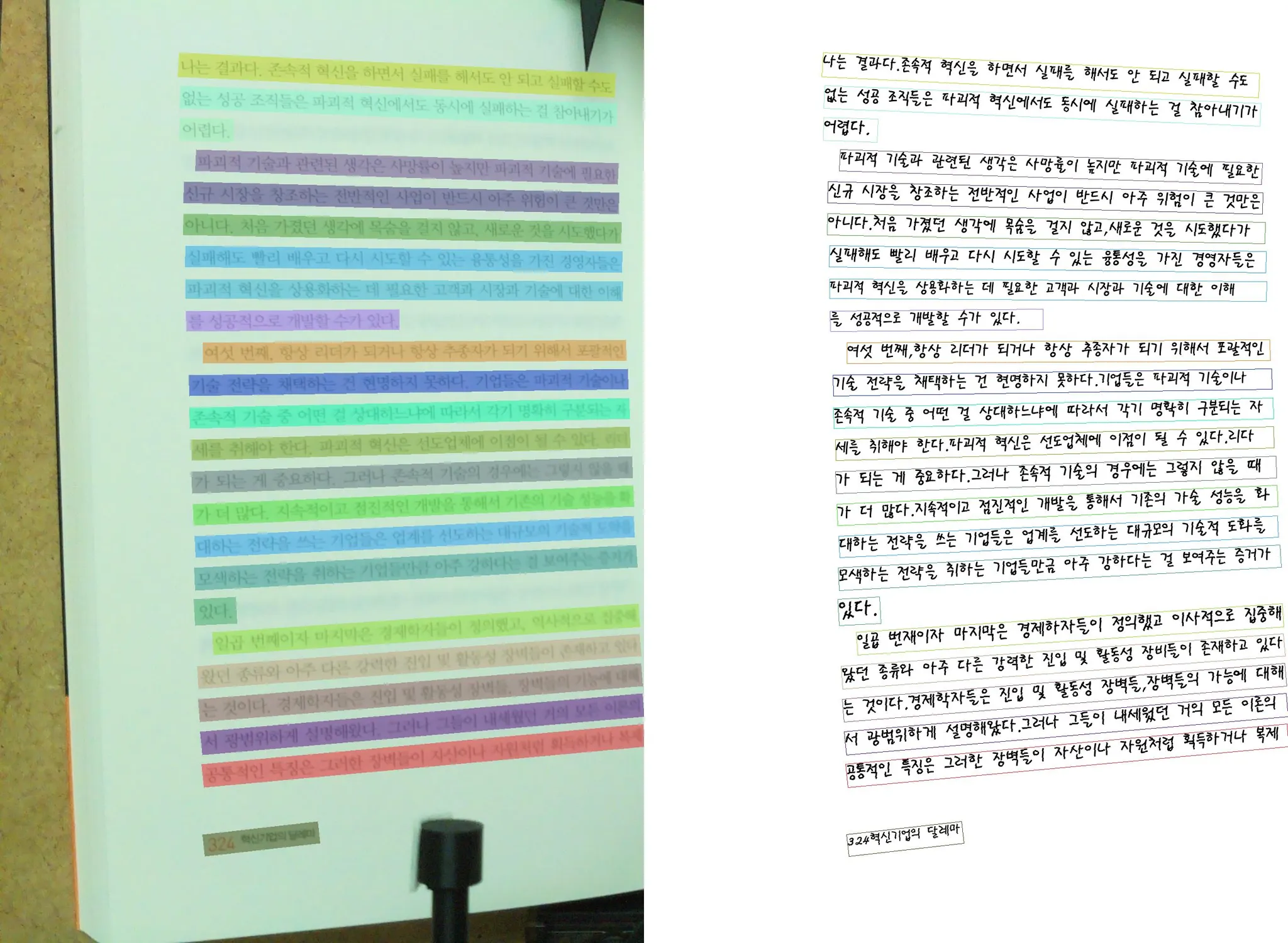
DeepSeek-OCR이 제일 좋다! DeepSeek-OCR로 교체
3 Undervolt
1️⃣ 문제 요약
- 구성:
- 5V / 6A 어댑터 1개
- Raspberry Pi 3B+, 서보모터 MG90S × 7개, WAGO 커넥터 분배
- 증상:
- 모터 여러 개 구동 시 끊김 / 스로틀(0x50005) / 카메라 버벅임
- 어댑터, Pi 모두 뜨거움 → 전압 강하로 인한 언더볼티지
서보모터와 파이가 같은 파워를 쓰게 되면서 서보모터 구동 시 파이의 전압강하로 인한 문제. 이전 구성으로는 문제 없었음.
2️⃣ 근본 원인 분석
vcgencmd 이용해서 스로틀 원인 파악
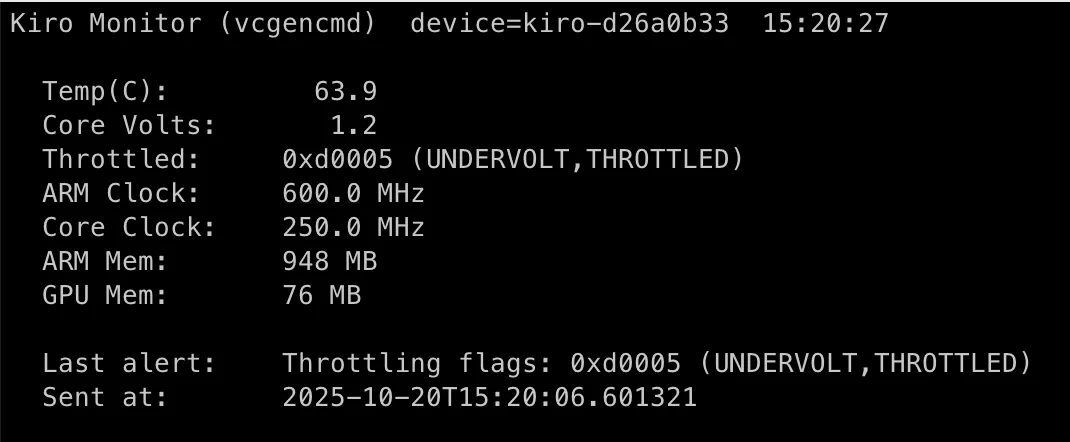
nvitop 같은 kiromon daemon 대시보드 만듬
⇒ 확인 결과 열인 줄 알았으나 undervolt 문제였음
| 비트 위치 | 의미 | 설명 |
|---|---|---|
0x00001 |
현재 언더볼티지 | 전압이 부족함 (Pi 전원 불안정) |
0x00002 |
현재 스로틀링 중 | 온도 과열 또는 전압 문제로 CPU 클럭이 낮아짐 |
0x00004 |
현재 주파수 제한 중 | 전원 부족/온도 제어로 주파수 제한 중 |
0x00008 |
현재 소프트리밋 중 | 전원 부족으로 부하 제어 중 |
0x10000 |
과거 언더볼티지 발생함 | 한 번이라도 전압이 낮았던 적 있음 |
0x20000 |
과거 스로틀링 발생함 | 한 번이라도 클럭이 떨어진 적 있음 |
0x40000 |
과거 주파수 제한 발생함 | 주파수 제한이 있었음 |
0x80000 |
과거 소프트리밋 발생함 | 한때 전원 부족 상태였음 |
| 구간 | 문제 | 결과 |
|---|---|---|
| 어댑터 → 터미널 → WAGO | 배선 저항/임피던스 ↑ | 서보 부하 시 5V → 4.4~4.5V로 낙하 |
| WAGO → 모터 | 서보 피크 전류 (각 1A+) | 전원 노이즈·리플 유입 |
| Pi + 서보 전원 공유 | 순간 전류 피크 | Pi 전원 불안정, throttled 발생 |
👉 핵심: “공유 전원 구조에서의 순간 전압강하”
→ 파이 안정전원 확보가 최우선.
3️⃣ 용어 정리
| 용어 | 설명 |
|---|---|
| 발열 (Heat Generation) | 전류 흐름으로 발생하는 열 (전기적 손실) |
| 방열 (Heat Dissipation) | 발생한 열을 공기 중으로 내보내는 과정 |
| 임피던스 (Impedance) | 교류 저항 (전선·커넥터·배선길이 등 포함) |
| 인덕턴스 (Inductance) | 전류 변화에 대한 저항 성질 → 서보처럼 급격한 전류 변화에 전압 출렁임 유발 |
4️⃣ 개선 전략 요약
| 단계 | 목적 | 조치 |
|---|---|---|
| 1단계 – 노이즈 필터링 | 서보 전류 리플 흡수 | WAGO 근처에 전해 1000µF ×3 + 세라믹 0.1µF ×2 |
| 2단계 – 전압강하 보정 | Pi 입력 전압 ≥4.9V 유지 | 쇼트키 다이오드 or 아이디얼 다이오드 사용 |
| 3단계 – 전압 안정화 | 부하 상관없이 5.2V 고정 | Buck-Boost(승강압) 모듈 사용 |
| 4단계 – 배선 개선 | 저항 최소화 | 18–20AWG 굵기, 길이 <30cm, 스타형 분배 |
| 5단계 – 소프트웨어 측면 | 피크 분산 | 모터 순차 구동, 가감속 적용 |
5️⃣ 캐패시터 구성 (서보 노이즈 제거)
위치: 터미널블록 → 캐패시터 → WAGO 커넥터
- 전해 1000µF 10V 이상 × 3개 (병렬)
- 세라믹 0.1µF (104Z 등) × 2개
- 다리는 짧게 잘라서 +/− 극성 맞춰 꽂기
- 이유:
- 전해 → 저주파 리플
- 다리 자르는 이유: 가까운 위치일수록 효과↑ (임피던스↓)
전해 3개 이유
| 항목 | 큰 캐패시터 하나 | 여러 개 병렬 |
|---|---|---|
| 용량 | 크다 (예: 4700µF) | 합쳐도 비슷 (3×1000µF=3000µF) |
| ESR (내부저항) | 높음 | 병렬이면 낮아짐 (전류 분담) |
| 응답 속도 | 느림 | 여러 개면 조금 더 빠름 |
| 내구성 | 한 개 과부하 시 손상 | 분산되어 수명 ↑ |
전류 피크를 빠르게 처리하려면 ESR이 낮고 응답이 빠른 여러 개 병렬이 유리해서
세라믹 → 고주파 노이즈
| 항목 | 전해캐패시터 (Electrolytic) | 세라믹 캐패시터 (Ceramic) |
|---|---|---|
| 유전체(Dielectric) | 액체 전해질 + 산화막 | 세라믹(고체) |
| 전극 면적 | 넓지만 얇은 금속박 접힘 | 얇은 세라믹 층 수십~수백 겹 |
| 리드 길이 | 길다 (수 mm~cm) | 매우 짧다 (내부 적층 구조) |
| ESR (내부저항) | 높음 (수십 mΩ~수 Ω) | 매우 낮음 (mΩ 단위 이하) |
| 반응 속도 | 느림 (µs~ms급) | 빠름 (ns~µs급) |
| 용량 범위 | 크다 (µF~수천 µF) | 작다 (pF~수 µF) |
| 주파수 대응 | 저주파(느린 변화)에 강함 | 고주파(빠른 변화)에 강함 |
⇒
| 비교 항목 | 전해캐패시터 | 세라믹 캐패시터 |
|---|---|---|
| 주요 역할 | 큰 전류 피크 완충 | 고주파 리플 억제 |
| 응답 속도 | 느림 (ms급) | 빠름 (ns급) |
| ESR | 높음 | 매우 낮음 |
| 용량 | 큼 | 작음 |
| 같이 쓰는 이유 | 주파수 대역 전체 안정화 | 서로 보완관계 |
6️⃣ 다이오드 적용 (간단 보호 + 전압보정)
| 항목 | 설명 |
|---|---|
| 용도 | 역류 방지 + 미세한 전압 드롭(0.2~0.3V)로 노이즈 완화 |
| 추천 부품 | 1N5822, MBR340, MBR540 (3~5A급) |
| 위치 | Pi로 가는 +선 직렬 (띠가 Pi 방향) |
| 주의 | 0.2~0.3V 전압낙하 있음 → 어댑터 5.1V 이상 필요 |
7️⃣ 전압강하 문제 해결 최종 단계: Buck-Boost 모듈
선택 이유
- 서보 부하와 상관없이 Pi에 항상 5.2V 공급
- 어댑터 5V 입력이어도 내부에서 자동 승압
- 리플과 전압낙하 완전히 차단
8️⃣ 모듈 후보 비교
| 모델 | 특징 | 적합도 |
|---|---|---|
| LTC3780 (SZH-EK334) | 동기식, 7A, 효율 95–98%, 리플 50mVp | ⭐⭐⭐⭐⭐ (최적) |
| EK331 (LCD형) | 3A, LCD표시, 효율 88% | ⭐⭐⭐ (중간) |
| EK341 (3A 기본형) | 저가, 리플 큼 | ⭐⭐ (테스트용) |
최종 추천:
🔹 [OEM] LTC3780 7A Buck-Boost (SZH-EK334)
완전 자동 승강압 + 동기식 정류 → 발열·리플 최소.
9️⃣ 연결 구조 (최종 안정 버전)
[5V 6A Adapter]
│
├──→ [ 터미널블록 + WAGO ] → 서보모터 ×7
│ ↑
│ └─ 전해 1000µF ×3 + 세라믹 0.1µF ×2
│
└──→ [ LTC3780 Buck-Boost Module ]
│
├── IN+ : 어댑터 + (터미널에서 분기)
├── IN− : 어댑터 − (공통 GND)
│
├── OUT+ : Raspberry Pi GPIO 2 or 4 (5V)
└── OUT− : Raspberry Pi GPIO 6 or 9 (GND)
추가 팁:
- OUT단에 전해 1000µF + 세라믹 0.1µF 병렬 추가
- 트리머로 5.20V 세팅 (멀티미터 확인 후 고정)
- micro-USB 전원선은 반드시 제거 (동시 연결 금지)
vcgencmd get_throttled=0x0→ 안정화 확인
BOM
| 분류 | 품목 | 가격(원) |
|---|---|---|
| 쇼트키 다이오드 | 1N5822 | 126원 / 10개 |
| 세라믹 캐패시터 | 60원 x 10 | |
| 전해 캐패시터 | EEUFR1A102L | 781원 x 15 |
| 벅부스트 컨버터 | LTC3780 | 19,200원 |
대체 옵션 요약
| 방식 | 장점 | 단점 |
|---|---|---|
| 1. 다이오드만 사용 | 단순, 싸다 | 4.7V 이하로 떨어지면 스로틀 발생 |
| 2. Buck-Boost만 사용 | 완벽한 안정화 | 가격↑, 약간의 발열 |
| 3. 전원 분리 (2어댑터) | 전압 간섭 0 | 어댑터 2개 불편 |
| 4. 9V 어댑터 + Buck 변환 | 효율 최고 | 어댑터 교체 필요 |
✅ 최종 결론
| 항목 | 선택 | 이유 |
|---|---|---|
| 전원 안정화 방식 | LTC3780 Buck-Boost (5.2V 출력 고정) | 완전 자동 승강압, 고효율 |
| 보조 안정화 부품 | 전해 1000µF×3 + 세라믹 0.1µF×2 | 리플 억제 |
| 보호 부품 (선택) | 1N5822 쇼트키 or 아이디얼 다이오드 | 역류·노이즈 보호 |
| 배선 굵기 | 18~20 AWG (짧게) | 전압낙하 최소화 |
| 측정 검증 | vcgencmd get_throttled → 0x0 | 정상판정 |
🔹 요약 한 줄:
“5V 어댑터 하나로, LTC3780 + 1N5822 쇼트키 다이오드로 Pi만 5.2V 고정 공급.
WAGO에 캐패시터 달고, GND 공통 유지.
→ 발열·리플·전압낙하 전부 해결.”
4 Production
4.1 Material Management
| 분류 | 품목 | 용도 | 가격(원) | 보유 수량 |
|---|---|---|---|---|
| 💻 제어 보드 | Raspberry Pi 3 B+ | 전체 시스템 제어 | 61,050 | 5개 |
| 💽 저장 장치 | SanDisk microSD | OS / 코드 / 데이터 저장 | 6,100 | 5개 |
| 🎥 카메라 | 라즈베리파이 카메라 모듈 v1, FFC케이블 1m | 페이지 이미지 캡처 | 3,180 + 6,460 = 9,640 | 2개 / 2개 |
| ⚙️ 구동부 | MG90S 서보모터 ×7 | 리프트, 턴, 홀드, 프레스 암 제어 | 14,000 | 50개 |
| 🔌 전원 | DC 5V 6A 어댑터 (TY0506000Z1MN) | 전체 전원 공급 | 15,800 | 5개 |
| 🧠 회로/케이블 | 점퍼 케이블, WAGO 221-420, 터미널 블록 잭, DC전원 2분배 케이블, DCtoUSB2.0 5핀 젠더, 쇼트키 다이오드, 세라믹 캐패시터, 전해 캐패시터, 벅부스트 컨버터 | 전원 분배 및 연결 | 200x17 + 2000x2 + 220x2 + 4,000 + 1,020 + 126 + 60x2 + 781x3 + 19200 = 34,600 | 30개 / 0개 / 0개 / 0개 / 0개 |
| 🏗 프레임 | MDF 6T (300×1200mm) | 본체 플레이트 | 7,900 | 5개 |
| 🏗 구조물 | PVC 닥트 40×30mm (0.5m) | 넥 구조 | 1,300 | 5개 |
| 🧵 재료 | BambuLab PLA Basic | 3D 프린팅 부품 | 5,000 | 2kg |
| 총합 | 155,000 |
5대 더 만들 수 있도록 추가 구매
카메라 ⇒ 카메라 모듈 +3, FFC케이블 +3
회로/케이블 ⇒ 점퍼케이블 수수 WAGO 221-420 +15, 터미널 블록 잭 +5, DC전원 2분배 케이블 +5, DCtoUSB2.0 5핀 젠더 +5, 쇼트키 다이오드 +10, 세라믹 캐패시터 +10, 전해 캐패시터 +15, 벅부스트 컨버터 +1
(벅부스트 컨버터는 하나 테스트 이후 추매)
4.2 Pricing
생산에 3시간 소요
v1.2: 149,000원
v1.3: 199,000원
5 Fulfillment
5.1 Packaging
- 완충재 / 스티로폼 / 박스 / 테이프 구매
흔들림 및 낙하 테스트- 이리저리 흔들고 50cm 정도 높이에서 던져도 잘 동작함

5.2 Shipment
- CU 택배
6 KC인증
10/20 - 라즈베리파이 NDA 완료신청 - 전화 완료- 10/22 시료 배송